一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。

二、算法介绍
角蜥优化算法 (Horned Lizard Optimization Algorithm ,HLOA)由Peraza-Vázquez等人于2024年提出的一种新颖的元启发式优化算法,它在数学上模拟了角蜥皮肤变黑或变亮、喷血和移动逃生防御方法。在蜥蜴行为中,蜥蜴通过变得半透明来改变颜色,以避免被捕食者发现。角蜥蜴可以使它的皮肤变亮或变黑,这取决于它是否需要减少或增加其太阳热增益。皮肤变黑或变亮策略是通过包括影响这些皮肤颜色变化的刺激激素黑色素团率 (α-MHS) 来建模的。此外,还从数学上描述了从移动到规避的策略。角蜥蜴的射血防御机制,被描述为弹丸运动,也被建模。这些策略平衡了解决方案空间中局部和全局搜索的利用和探索机制。
https://blog.csdn.net/weixin_46204734/article/details/136415764
参考文献:
[1]Peraza-Vázquez, H., Peña-Delgado, A., Merino-Treviño, M. et al. A novel metaheuristic inspired by horned lizard defense tactics. Artif Intell Rev 57, 59 (2024). A novel metaheuristic inspired by horned lizard defense tactics | Artificial Intelligence Review
close all
clear
clc
addpath('./HLOA/')
dbstop if all error
warning ('off')
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=100;%种群大小(可以自己修改)
maxgen=100;%最大迭代次数(可以自己修改)
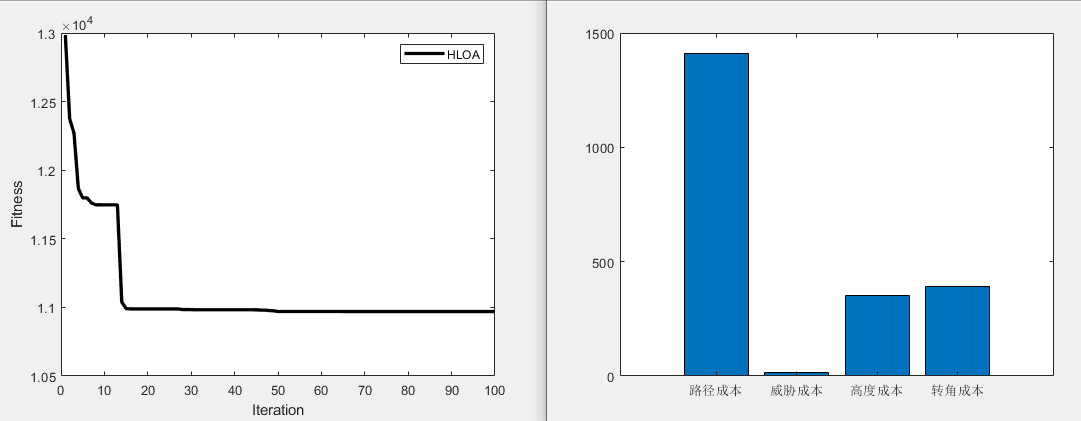
[fMin5,bestX5,ConvergenceCurve5] = HLOA(pop, maxgen,Xmin,Xmax,dim,fobj);
cost=MyCost(bestX5,2);%'路径成本','威胁成本','高度成本','转角成本'
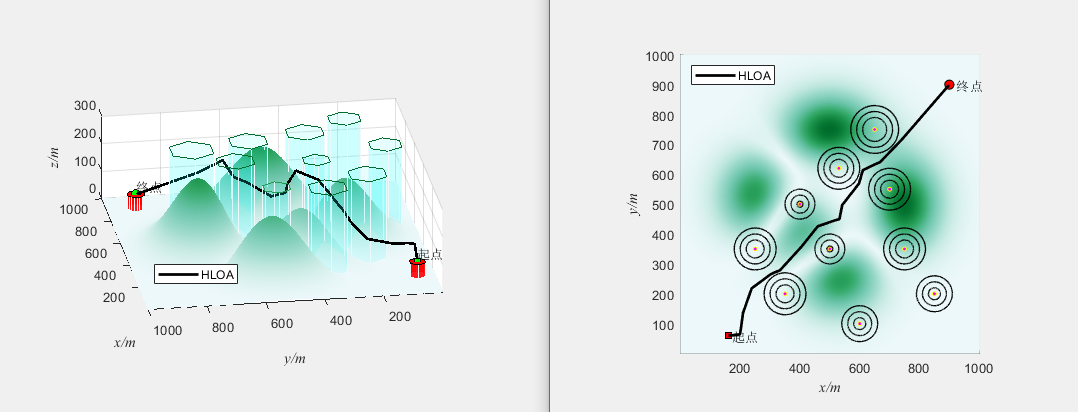
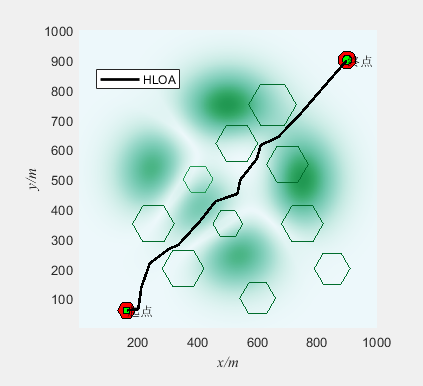
%% 计算航迹坐标
BestPosition5 = SphericalToCart(bestX5);
%% 保存各算法的目标函数值及收敛曲线
save fMin5 fMin5
save ConvergenceCurve5 ConvergenceCurve5
save cost cost
%% 保存航迹坐标
save BestPosition5 BestPosition5
三、部分结果
四、完整MATLAB代码