一、原理介绍
遗传算法是一种基于生物进化原理的优化算法,常用于求解复杂问题。在机器人栅格地图最短路径规划中,遗传算法可以用来寻找最优路径。
遗传算法的求解过程包括以下几个步骤:
1. 初始化种群:随机生成一组初始解,每个解表示机器人在栅格地图上的路径。
2. 评估适应度:根据路径的长度或者其他评价指标,计算每个解的适应度值。
3. 选择操作:根据适应度值,选择一部分优秀的解作为父代,用于产生下一代解。
4. 交叉操作:通过交叉操作,将父代解的某些部分进行交换和组合,生成新的解。
5. 变异操作:对新生成的解进行变异操作,引入一定的随机性,增加解的多样性。
6. 更新种群:将新生成的解加入到种群中,并淘汰一部分适应度较低的解。
7. 终止条件判断:根据预设的终止条件(如达到最大迭代次数或找到满意的解),判断是否结束算法。
8. 输出结果:输出最优解作为机器人在栅格地图上的最短路径。
二、部分代码
close all;
clear;
clc;
% 输入数据,即栅格地图.20行20列
Grid= [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 1 0 0 0 1 1 1 0 0 0 0 0 0 1 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 1 1 1 1 1 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 1 1 1 0 0;
0 1 1 1 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0;
0 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 1 0 1 1 0 0 1 1 1 0;
0 1 1 1 0 0 0 0 0 0 1 0 1 1 0 0 0 0 1 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0;
0 0 0 0 0 0 0 1 1 0 1 1 1 1 0 0 0 0 1 0;
0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 1 0;
0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 1 1 1 1 0;
0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0;
0 0 1 1 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 0;
0 0 1 1 0 0 1 1 1 0 1 0 0 0 0 0 0 0 1 0;
0 0 0 0 0 0 1 1 1 0 1 0 0 0 1 0 0 1 1 0;
0 0 0 1 0 0 0 0 0 0 0 0 0 0 1 0 0 1 1 0;
0 0 1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];
start_num = 18; % 起点编号
end_num = 380; % 终点序号
NP = 300; % 种群数量
max_gen = 300; % 最大进化代数
pc = 0.8; % 交叉概率
pm = 0.2; % 变异概率
a = 1; % 路径长度比重
b = 8; % 路径顺滑度比重
z = 1;
new_pop1 = {}; % 元胞数组,存放路径
[y, x] = size(Grid);
% 起点所在列(从左到右编号1.2.3...)
start_column = mod(start_num, x) + 1;
% 起点所在行(从上到下编号行1.2.3...)
start_row = fix(start_num / x) + 1; %Y = fix(X) 将 X 的每个元素朝零方向四舍五入为最近的整数
% 终点所在列、行
end_column = mod(end_num, x) + 1;
end_row = fix(end_num / x) + 1;
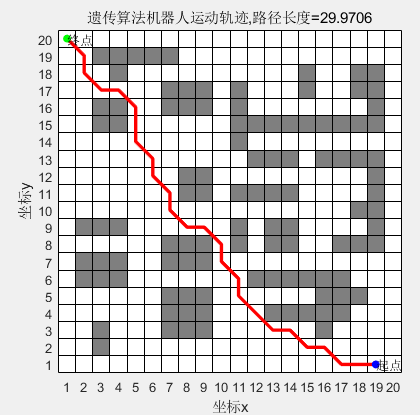
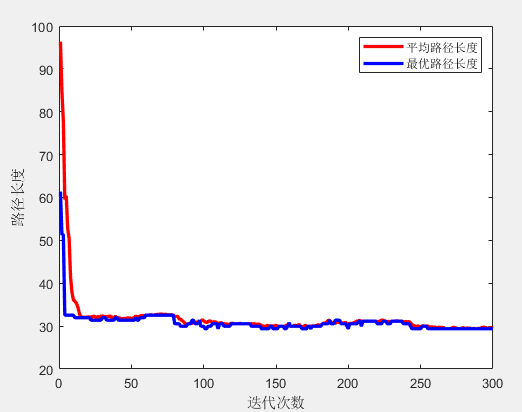
三、部分结果
四、完整MATLAB代码
点击main.m即可运行,可以自定义地图及起始点。