一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。

二、算法介绍
鹦鹉优化算法(Parrot optimizer,PO)由Junbo Lian等人于2024年提出的一种高效的元启发式算法,该算法从驯养的鹦鹉中观察到的觅食、停留、交流和对陌生人行为的恐惧中汲取灵感。这些行为被封装在四个不同的公式中,以促进寻找最佳解决方案。与遵循单独探索和开发阶段的传统元启发式算法相比,PO 群体中的每个个体在每次迭代期间都会随机表现出这四种行为中的一种。这种方法更恰当地表示了在驯化鹦鹉中观察到的行为随机性,并显着增强了种群多样性。通过偏离传统的勘探-开采两阶段结构,PO有效地降低了被困在局部最优值中的风险,同时保持了解决方案的质量。PO的随机结构使其与传统算法区分开来,使其特别适合避免局部最优,并适用于现实世界的问题解决,特别是在医学领域https://blog.csdn.net/weixin_46204734/article/details/136423766
参考文献:
[1]Lian, Junbo, et al. “Parrot Optimizer: Algorithm and Applications to Medical Problems.” Computers in Biology and Medicine, Elsevier BV, Feb. 2024, p. 108064, doi:10.1016/j.compbiomed.2024.108064.
close all
clear
clc
dbstop if all error
warning ('off')
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=50;%种群大小(可以自己修改)
maxgen=100;%最大迭代次数(可以自己修改)
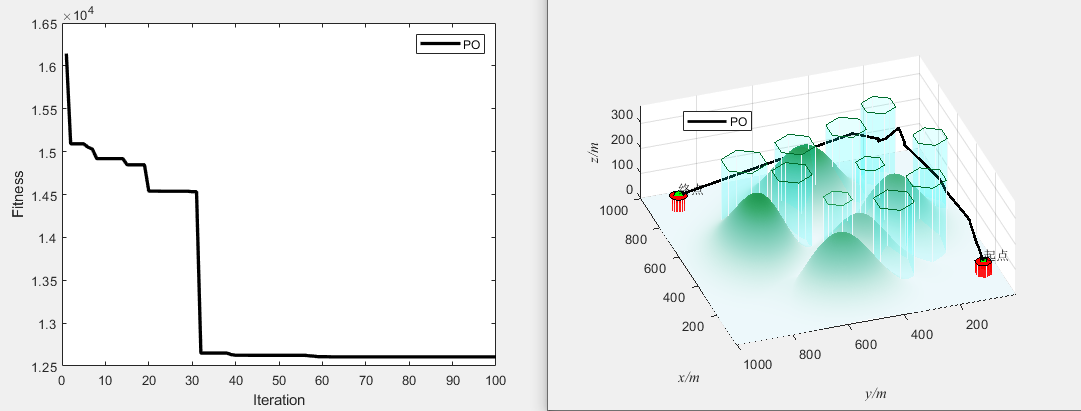
[fMin5,bestX5,ConvergenceCurve5] = PO(pop, maxgen,Xmin,Xmax,dim,fobj);
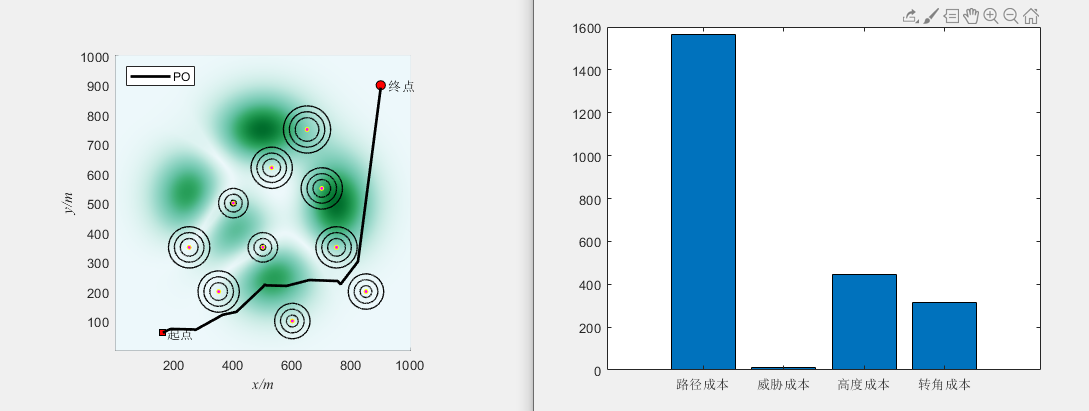
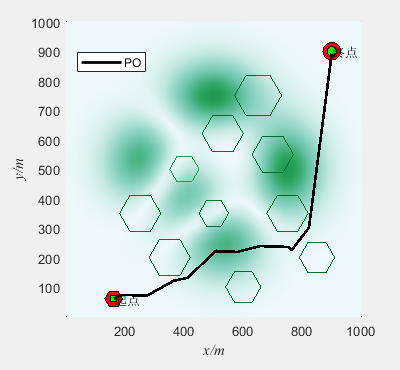
cost=MyCost(bestX5,2);%'路径成本','威胁成本','高度成本','转角成本'
%% 计算航迹坐标
BestPosition5 = SphericalToCart(bestX5);
%% 保存各算法的目标函数值及收敛曲线
save fMin5 fMin5
save ConvergenceCurve5 ConvergenceCurve5
save cost cost
%% 保存航迹坐标
save BestPosition5 BestPosition5
三、部分结果
四、完整MATLAB代码
