一、详细简介
无人机集群路径规划:孔雀优化算法POA求解无人机集群三维路径规划MATLAB - 知乎 (zhihu.com)
二、求解结果
close all
clear
clc
%% 三维路径规划模型定义
global startPos goalPos N num
num=5;%无人机的数量
N=1;%待优化点的个数(可以修改)
goalPos = [80, 90, 150]; %起点(可以修改)
startPos = [10, 10, 80]; %终点(可以修改)
SearchAgents_no=30; % 种群大小(可以修改)
Function_name='F1'; %F1:随机产生地图 F2:导入固定地图
Max_iteration=50; %最大迭代次数(可以修改)
% Load details of the selected benchmark function
[lb,ub,dim,fobj]=Get_Functions_details(Function_name);
[Best_score,Best_pos,curve]=POA(SearchAgents_no,Max_iteration,lb,ub,dim,fobj);
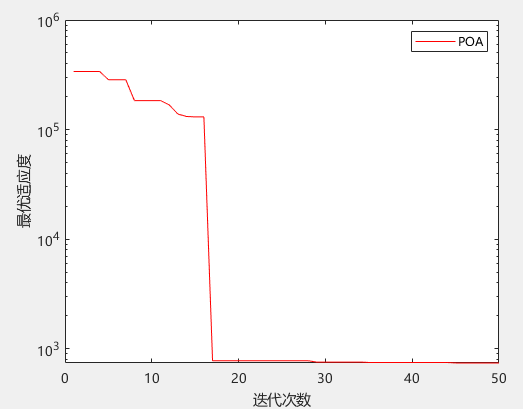
figure
semilogy(curve,'Color','r')
xlabel('迭代次数');
ylabel('最优适应度');
legend('POA')
set(gca,'FontName','Microsoft YaHei');
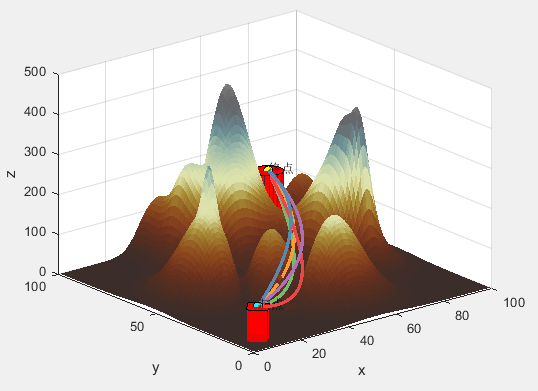
Position=[Best_pos(1:dim/3); Best_pos(1+dim/3:2*(dim/3)); Best_pos(1+(2*dim/3):end)]' %优化点的XYZ坐标(每一行是一个点)
display(['理论最优适应度: ', num2str(Best_score)]);
plotFigure(Best_pos)%画最优路径
三、参考代码