1.软件版本
matlab2017b
2.运行方法
使用matlab2017b版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
3.部分仿真截图
4.内容简介
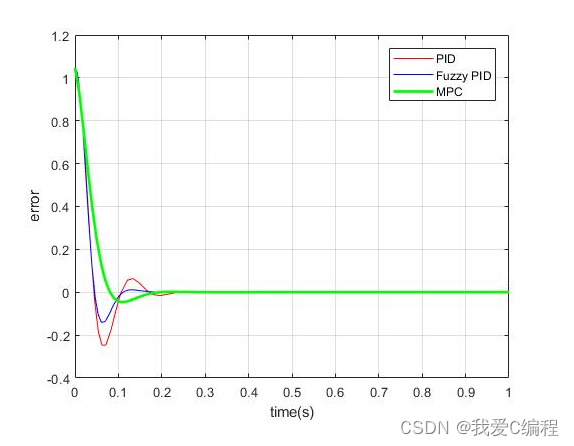
PID控制器,其超调较大,且控制器进入收敛状态时间也最长,。对于模糊PID控制器,其超调小于PID控制器,且收敛速度也较快,因此其性能优于传统的PID控制器。对于MPC控制器,其超调最小,控制器进入稳定状态速度也最快,因此其控制性能最优,但是MPC的上升时间较慢,大约需要0.1s左右完成。但在实际情况下,对控制对象起到影响的主要是控制器的超调和收敛稳定时间两个因素。因此,MPC控制器的控制效果最优,其次为模糊PID控制器,最次是PID控制器。