1.软件版本
matlab2013b
2.运行方法
使用matlab2013b版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
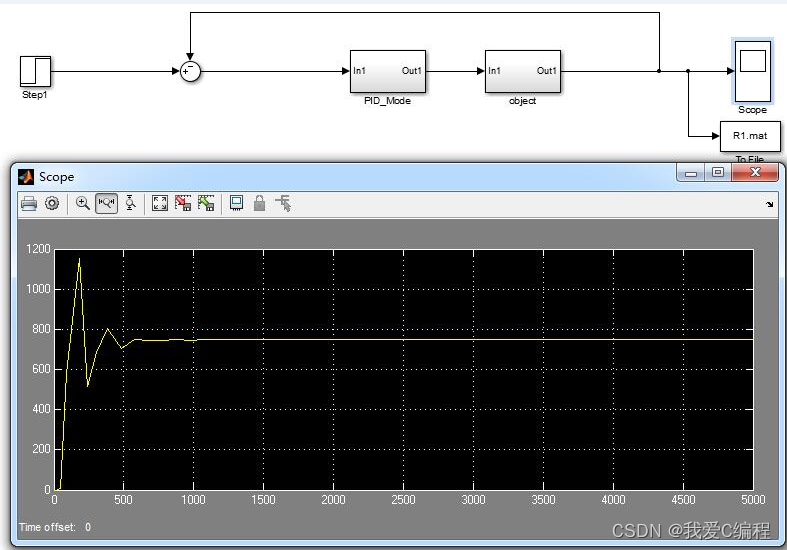
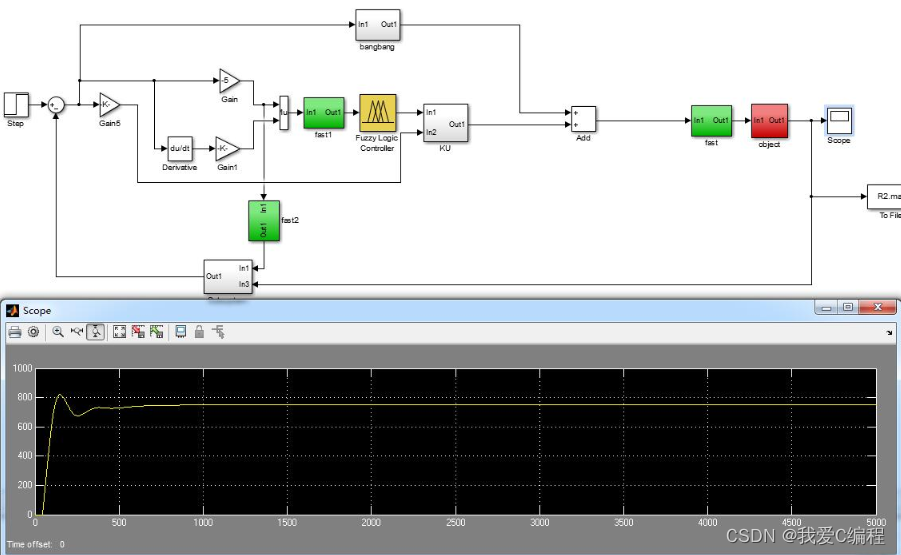
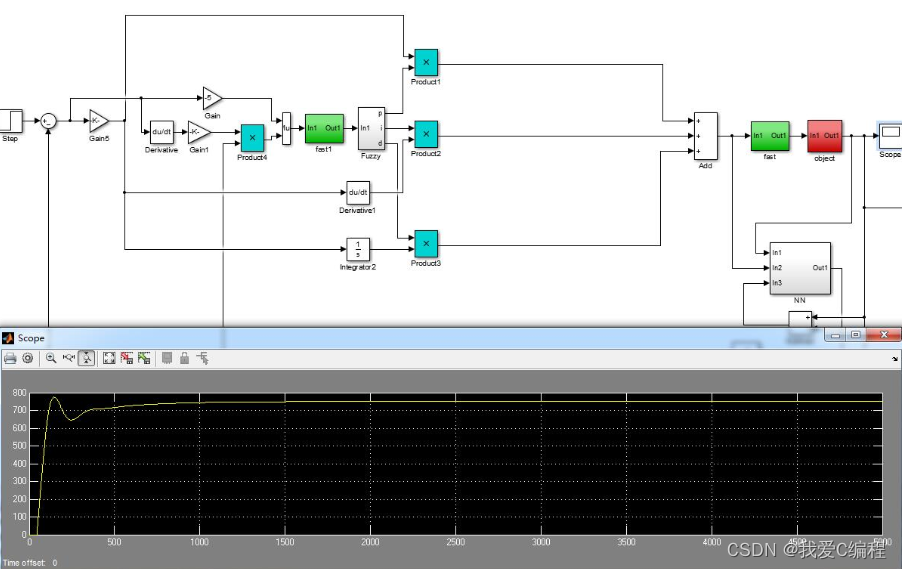
3.部分仿真截图
4.内容简介
模糊控制是一种基于经验的控制策略,它可以用来控制非线性和复杂的系统。模糊控制器通常包括模糊化、规则库、推理、去模糊化等四个主要步骤。
在模糊化阶段,将输入变量和输出变量转化为模糊集合,即将他们映射到模糊集合上。这样可以将连续的变量转化为离散的变量,便于后续的控制处理。
在规则库阶段,设定一些规则,用来描述输入变量和输出变量之间的关系。
在推理阶段,将输入变量和规则库中的规则进行匹配,得到一个模糊输出变量。
在去模糊化阶段,将模糊输出变量映射到实际控制量上,得到一个具体的控制量。
神经网络控制是一种基于学习的控制策略,它可以通过训练数据自适应地调整控制器的权值,以便实现更好的控制效果。神经网络控制器通常包括输入层、隐层、输出层等几个主要部分。