1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
3.部分仿真截图

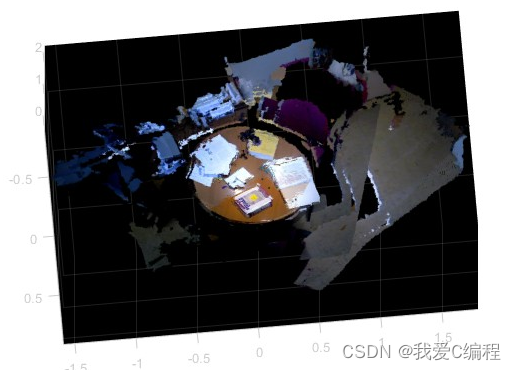
4.内容简介
通过激光扫描或RGB-D相机获取室内空间的点云数据。
对点云数据进行预处理,如去除噪声、滤波、降采样等。
使用SURF算法检测出点云中的关键点,并计算出关键点的描述符。
使用AFFINE算法在不同的仿射变换下对关键点进行匹配,并计算出匹配点对之间的变换矩阵。
使用RANSAC算法对匹配点对进行筛选,去除外点,得到一个可靠的匹配结果。
使用ICP算法将多个点云对齐,并拼接成一个完整的三维模型。
对三维模型进行后处理,如纹理映射、光照调整等。
最终生成一个高精度的三维室内模型。
基于SURF+AFFINE+RANSAC+ICP算法的三维点云室内重建具有高效性和鲁棒性,可以在不同的室内环境下得到准确的三维模型。