1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
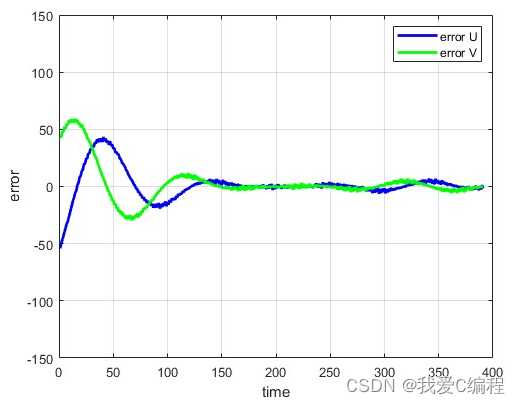
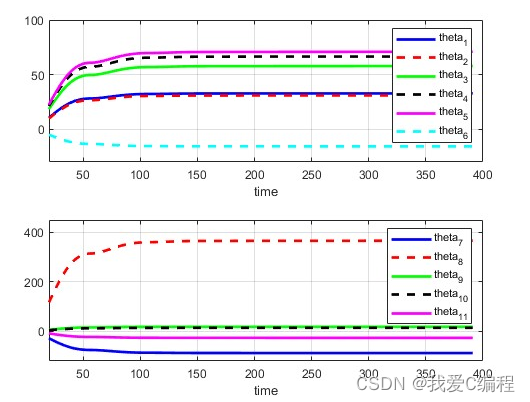
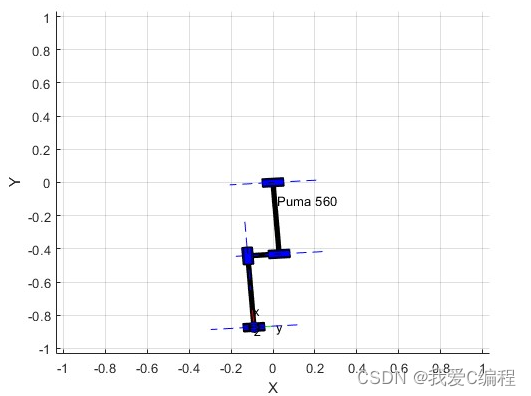
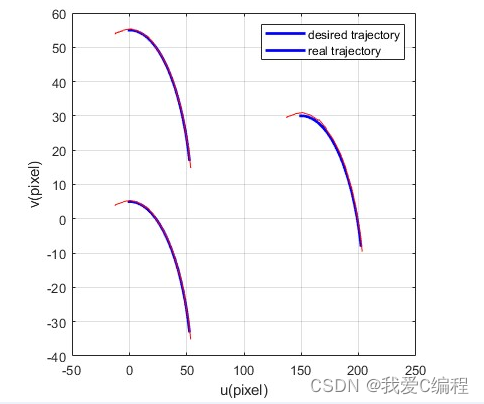
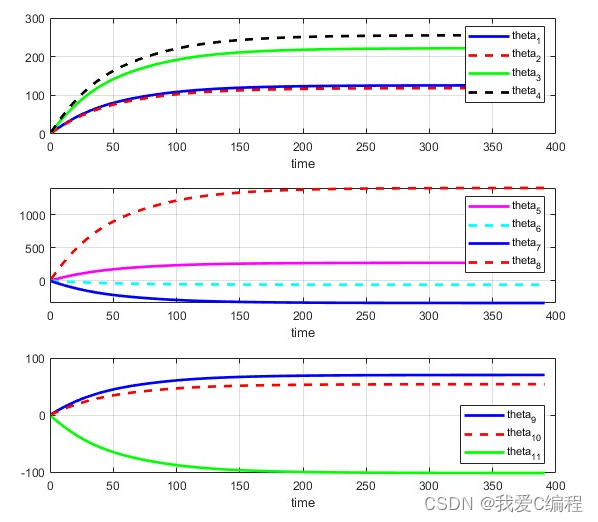
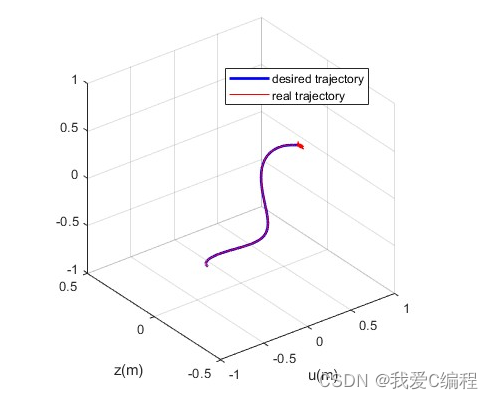
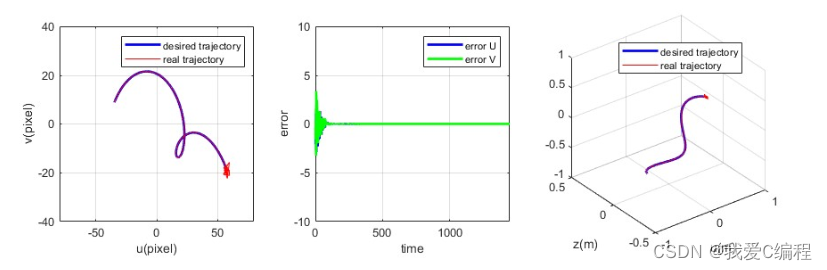
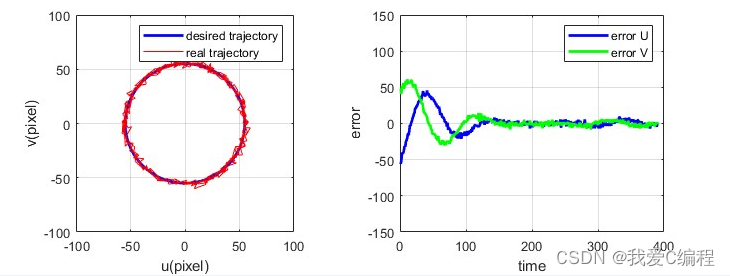
3.部分仿真截图
4.内容简介
PUMA560 机械臂是一种示教机器人。有六个自由度,包括6个旋转关節,模仿人的腰、肩、肘和手腕运动,能以规定的姿态到达工作范围内的任何一个点。包括:臂体、控制器和示教器三个部分。PUMA560 机器手是工业机器人(或称机器人操作臂)。从外形来看,它和人的手臂相似,是由一系列刚性连杆通过一系列柔性关节交替连接而成的开式链。PUMA560的基座、连杆一、连杆二、连杆三、连杆四到六分别类似于的盆骨、腰椎、大臂、小臂、腕手。操作臂的前端装有末端执行器或相应的工具,也常称为手或手爪。手臂的动作幅度一般较大,通常实现宏操作。