一、无人机模型
点击链接查看单个无人机模型:http://t.csdn.cn/5O6fc
参考文献:
[1]吕石磊,范仁杰,李震,陈嘉鸿,谢家兴.基于改进蝙蝠算法和圆柱坐标系的农业无人机航迹规划[J/OL].农业机械学报:1-19
[2]褚宏悦,易军凯.无人机安全路径规划的混沌粒子群优化研究[J/OL].控制工程:1-8
[3]MD Phung, Ha Q P . Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization: arXiv, 10.1016/j.asoc.2021.107376[P]. 2021.
二、鱼鹰优化算法
鱼鹰优化算法(Osprey optimization algorithm,OOA)由Mohammad Dehghani 和 Pavel Trojovský于2023年提出,其模拟鱼鹰的捕食行为。OOA具体原理参考如下链接:http://t.csdn.cn/Pjl7Y

参考文献:Dehghani Mohammad, Trojovský Pavel.Osprey optimization algorithm: A new bio-inspired metaheuristic algorithm for solving engineering optimization problems[J].Frontiers in Mechanical Engineering,2023,8.
三、求解结果
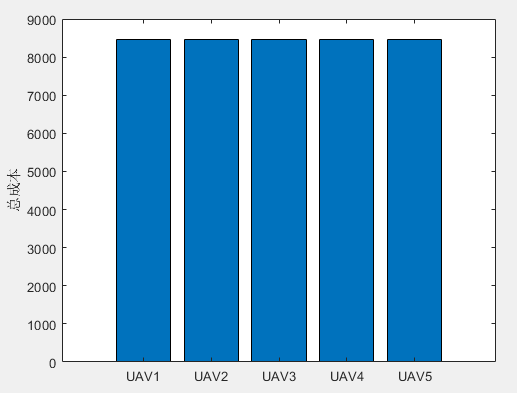
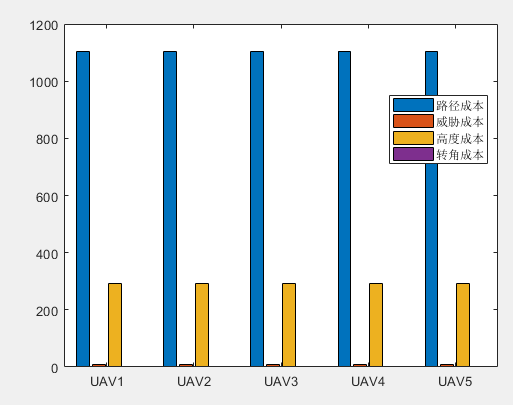
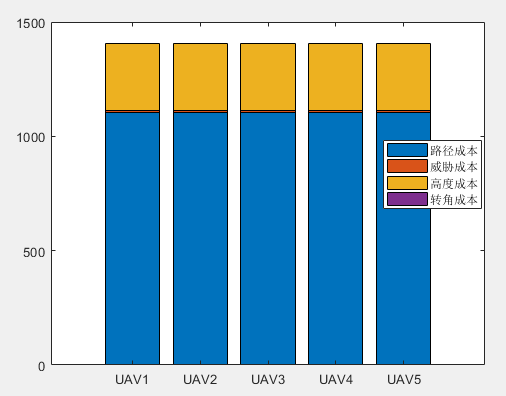
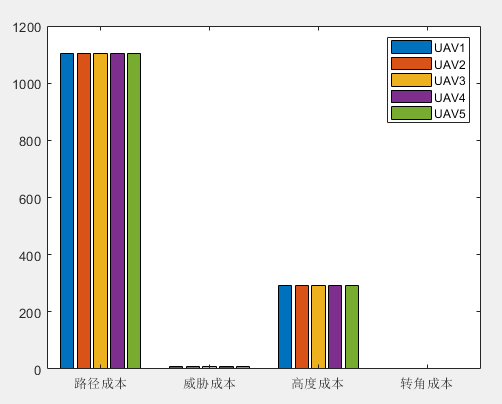
本文中以5个无人机构成无人机集群,采用鱼鹰优化算法同时规划五个无人机的路径,每个无人机的总成本由路径成本、威胁成本、高度成本和转角成本四个部分构成。无人机集群的总成本为5个无人机成本之和。
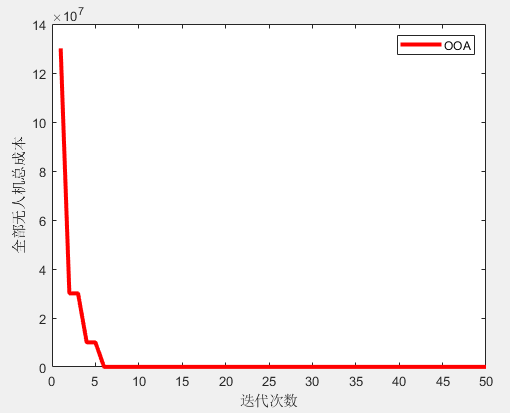
鱼鹰优化算法以5个无人机的待优化路径为决策向量,无人机集群的总成本为适应度函数值,设置种群大小为50,最大迭代次数为50。
部分代码:
close all clear clc dbstop if all error global model model = CreateModel(); % 创建模型 F='F1'; [Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息 pop=50;%种群大小(可以自己修改) maxgen=50;%最大迭代次数(可以自己修改) [fMin,bestX,ConvergenceCurve] = OOA(pop, maxgen,Xmin,Xmax,dim,fobj);
部分结果:


四、参考代码
文件夹内包含完整代码及使用说明,代码均能运行。