1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
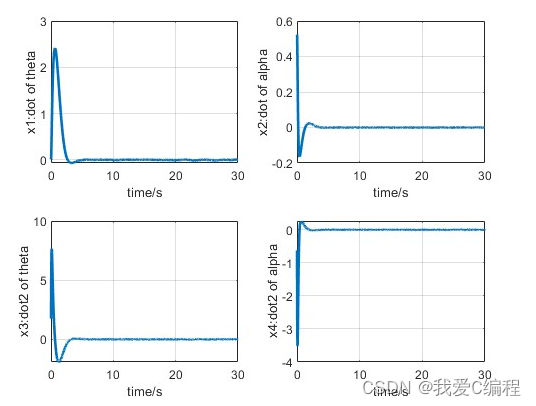
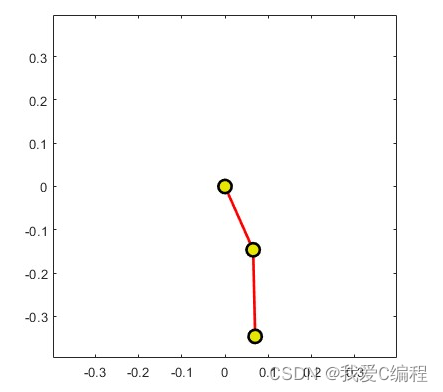
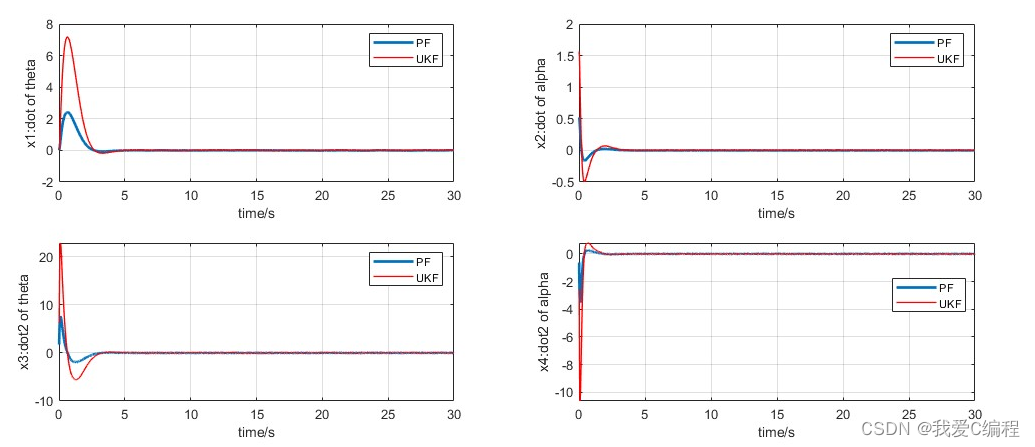
3.部分仿真截图
4.内容简介
倒立摆控制,使摆杆尽快达到平衡位置,且无大的振荡和过大的角度和速度的控制系统。当摆杆到达期望位置后,系统能克服随机扰动而保持稳定。该控制系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值,计算机在每一个采样周期中采集来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。按摆杆数量,分为一级、二级、三级倒立摆等。该系统是一个复杂的、不稳定的非线性系统,是进行控制理论研究的理想实验平台。