1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
3.部分仿真截图
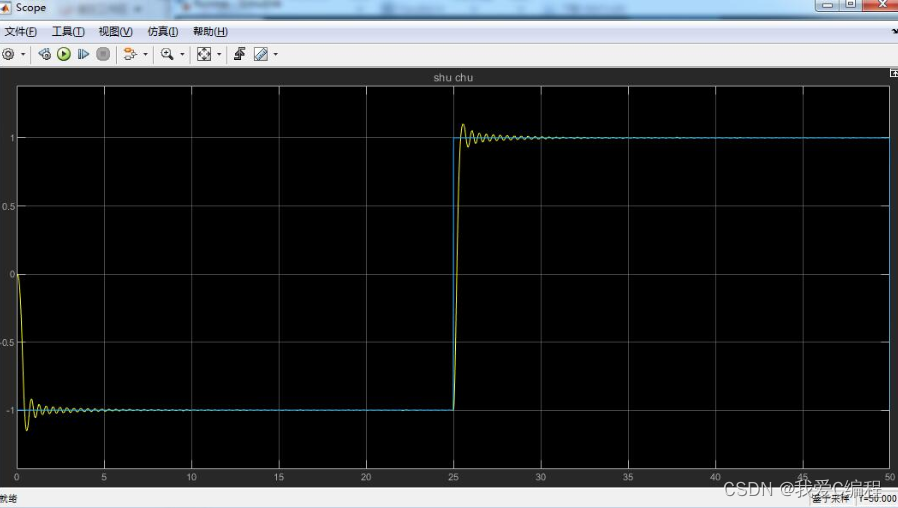
4.内容简介
自抗扰控制器主要由三部分组成:跟踪微分器(tracking differentiator),扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律(nonlinear state error feedback law)。自抗扰控制器自PID控制器演变过来,采取了PID误差反馈控制的核心理念。传统PID控制直接取参考给定与输出反馈之差作为控制信号,导致出现响应快速性与超调性的矛盾。