1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
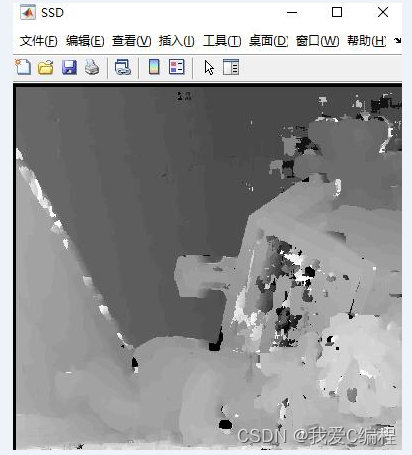
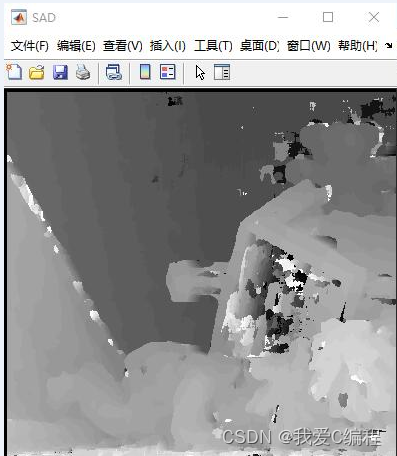
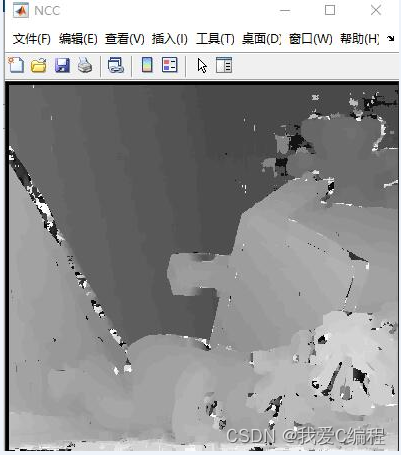
3.部分仿真截图

4.内容简介
深度学习的蓬勃发展得益于大规模有标注的数据驱动,有监督学习(supervised learning)推动深度模型向着性能越来越高的方向发展。但是,大量的标注数据往往需要付出巨大的人力成本,越来越多的研究开始关注如何在不获取数据标签的条件下提升模型的性能,也就是自监督学习(self-supervised learning)/无监督学习(unsupervised learning)。
对于立体匹配(stereo matching),或者双目深度估计,像LiDAR这样的设备是极其笨重且昂贵的,它所能收集的只是稀疏的深度信息,而我们需要的是密集的深度图(dense depth map);而基于结构光的设备往往只能在室内场景下进行深度信息标注,在室外场景下难以达到较高的标注质量。因此,自监督学习在立体匹配中得到越来越多的关注。本文主要梳理了近年来自监督学习在深度立体匹配中的应用方法,希望和大家一起探讨学习。