原文链接:https://blog.csdn.net/weixin_46204734/article/details/144474283
随着无人机技术的飞速发展,其在军事侦察、民用快递配送、地理测绘、应急救援等众多领域得到了广泛应用。在这些应用场景中,无人机需要在复杂的三维空间环境中自主飞行,安全、高效地从起始点到达目标点,这就使得无人机的三维路径规划成为一个关键技术问题。良好的路径规划能够提高无人机的飞行效率、降低能耗、避免碰撞障碍物以及应对各种突发情况,对于充分发挥无人机的性能和拓展其应用范围具有极为重要的意义。
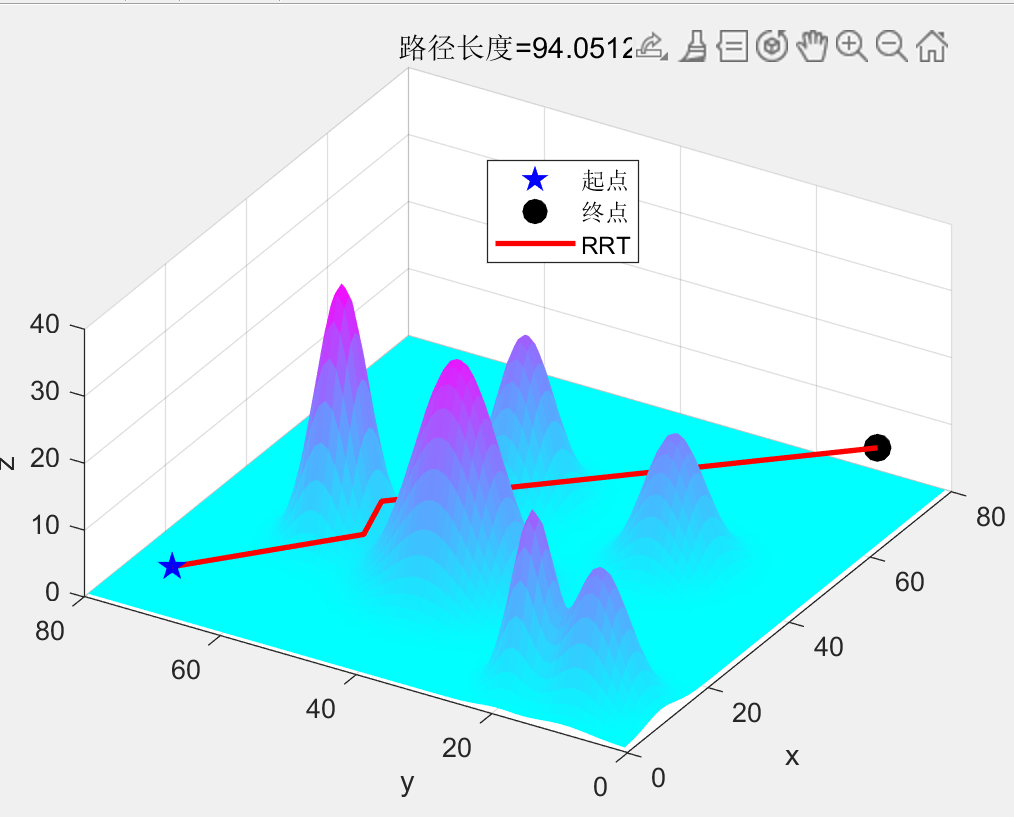
RRT(Rapidly-exploring Random Tree)算法是一种基于采样的路径规划算法。其核心思想是通过在空间中随机采样点,并将这些点逐步连接成树状结构,以探索从起始点到目标点的可行路径。在构建树的过程中,新采样的点会与树中已有的节点进行连接,若连接后不与障碍物发生碰撞,则将新点及其连接边加入树中,从而不断扩展树的范围,直到树中的某个节点接近目标点或者达到预设的迭代次数等停止条件。
RRT算法步骤
初始化:选择一个起始点作为树的根节点,并将其加入树中。
随机采样:在配置空间中随机选择一个点,这个点称为随机采样点。
寻找最近节点:在树中找到离随机采样点最近的节点,称为最近节点。
扩展新节点:从最近节点向随机采样点方向扩展一定步长(或距离),生成一个新的节点,称为新节点。
碰撞检测:检查从最近节点到新节点的路径是否与障碍物发生碰撞。如果没有碰撞,则将新节点加入树中。
目标检查:如果新节点足够接近目标点,则认为找到了一条可行路径,算法终止。
路径回溯:从目标点开始,通过新加入的节点回溯到起始点,形成完整的路径。
路径坐标:
5.0000 70.0000 5.0000
8.5303 66.4697 5.2716
12.0606 62.9394 5.5431
15.5909 59.4091 5.8147
19.1213 55.8787 6.0863
22.6516 52.3484 6.3578
26.4924 52.0046 9.5406
29.8887 48.3353 9.5764
33.2850 44.6660 9.6123
36.6813 40.9967 9.6482
40.0777 37.3274 9.6840
43.4740 33.6581 9.7199
46.8703 29.9888 9.7557
50.2666 26.3195 9.7916
53.6629 22.6502 9.8275
57.0592 18.9809 9.8633
60.4555 15.3116 9.8992
63.8518 11.6423 9.9351
67.2482 7.9730 9.9709
70.0000 5.0000 10.0000
路径长度:
94.0512
历时 0.081188 秒。