1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
3.部分仿真截图
4.内容简介
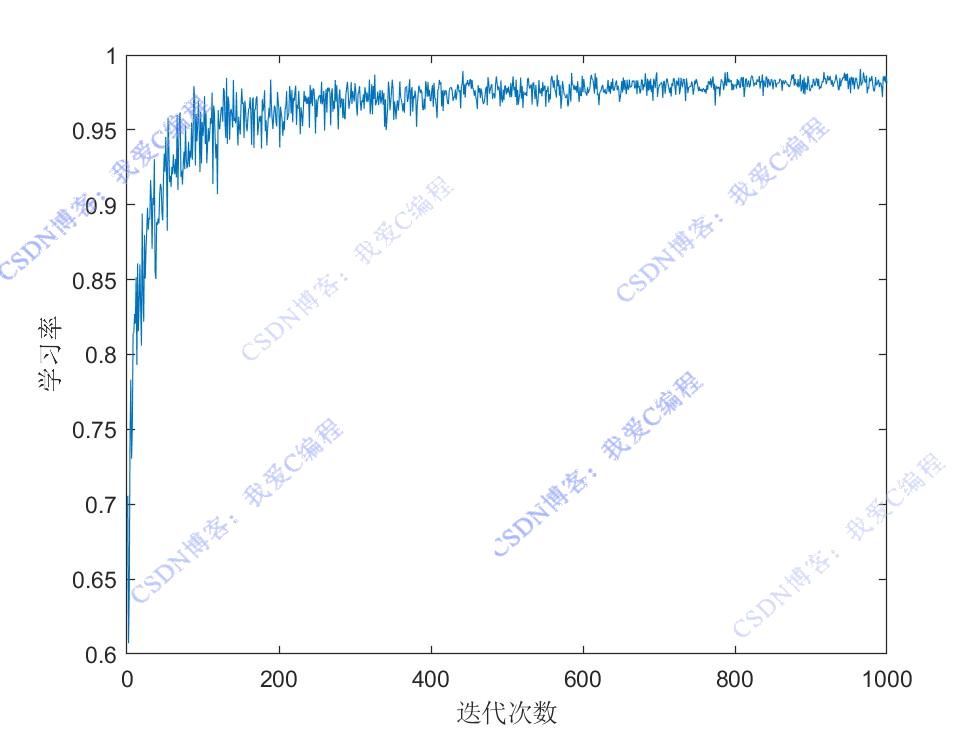
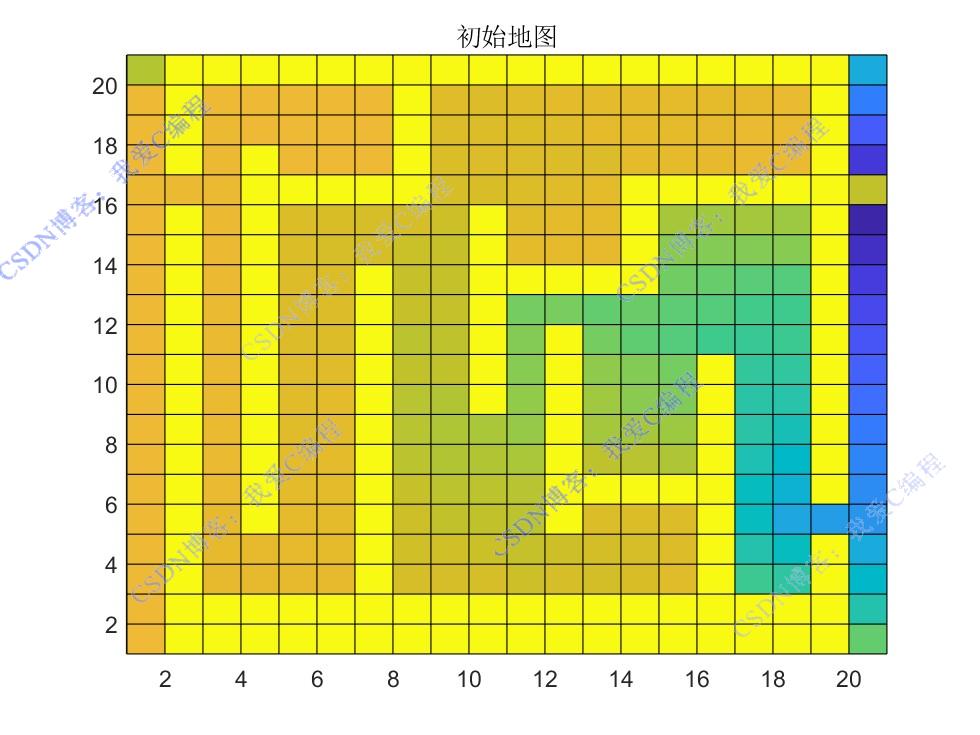
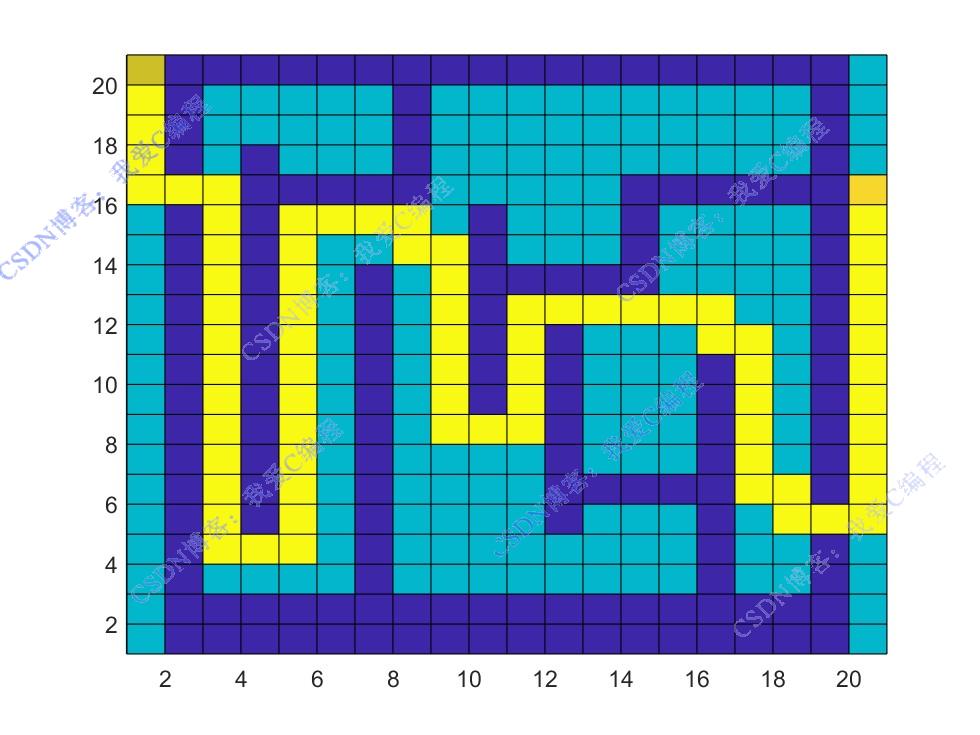
强化学习是机器学习中的一个领域,强调智能体(agent)如何在环境(environment)中采取一系列行动(action),以最大化累积奖励(reward)。智能体通过与环境进行交互,根据环境反馈的奖励信号来学习最优的行为策略。在机器人导航中,状态可以是机器人的位置和姿态,动作可以是不同的运动指令(如前进、后退、转弯等),奖励可以根据机器人是否接近目标位置或者避开障碍物来设定。通过 Q - Learning,机器人可以学习到从初始位置到目标位置的最优路径规划策略。在机器人路径规划问题中,机器人即为智能体,其所处的大规模栅格地图及相关物理规则等构成了环境 。智能体通过传感器感知环境的状态,并根据学习到的策略在环境中执行动作,如向上、向下、向左、向右移动等,环境则根据智能体的动作反馈相应的奖励信号和新的状态。