购买该资源将获得:完整Matlab源码源文件

本实验主要是学习应用最优二次型性能指标学习算法进行控制器的设计仿真研究。主要涉及自控原理、计算机仿真、智能控制、神经网络控制等知识,综合性较强。
设被控对象过程模型为:yout(k)=0.368yout(k-1)+0.264yout(k-2)+u(k-d)+0.632u(k-d-1)+ξ(k)
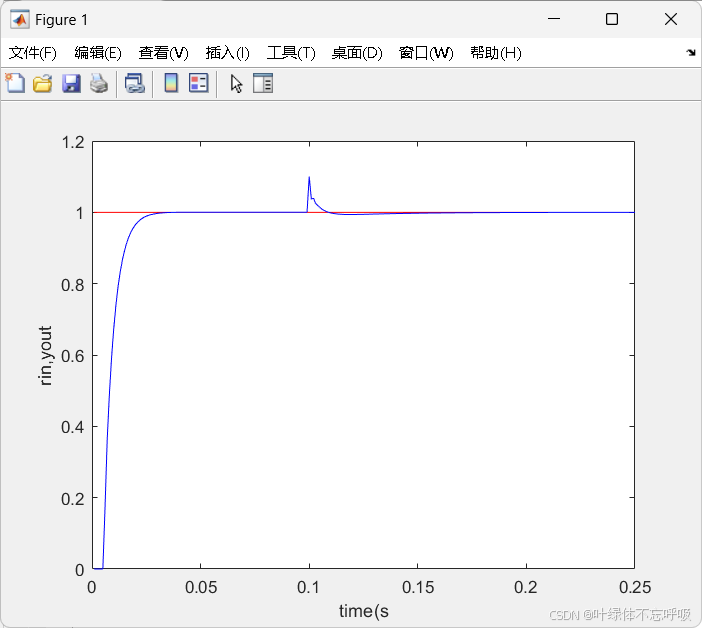
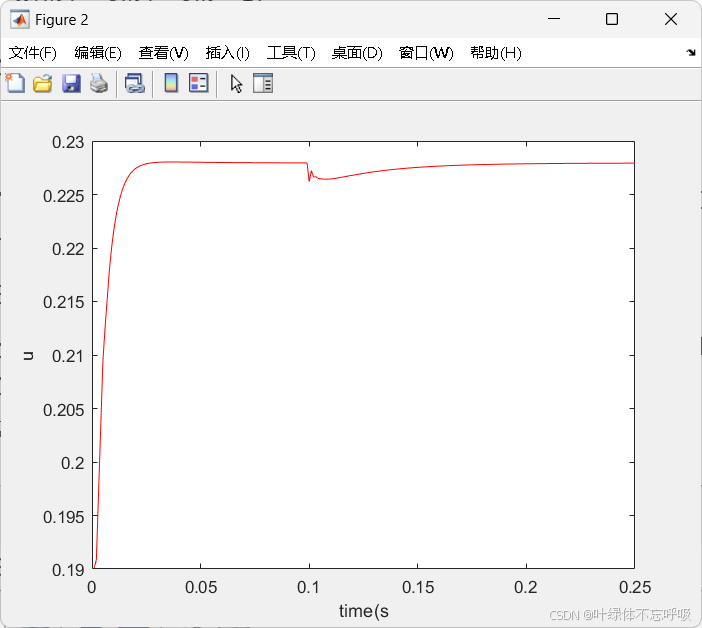
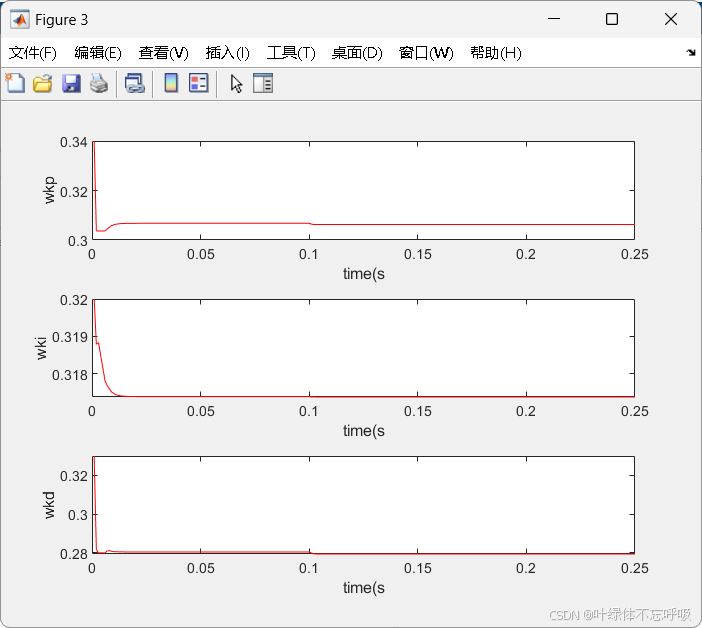
应用最优二次型性能指标学习算法进行仿真研究,最后要求得出神经元自适应PID跟踪及中权值变化结果。
1、实验原理:
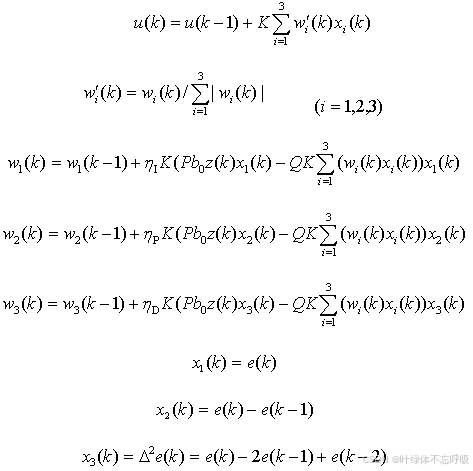
在最优控制理论中,采用二次型性能指标来计算控制律可以得到所期望的优化效果。在神经元学习算法中,也可借助最优控制中二次型性能指标的思想,在加权系数的调整中引入二次型性能指标,使输出误差和控制增量加权平方和为最小来调整加权系数,从而间接实现对输出误差和控制增量加权平方和为最小来调整加权系数,从而间接实现对输出误差和控制增量加权的约束控制。
设性能指标为:

式中,P、Q分别为输出误差和控制增量的加权系数,r(k)和y(k)为k时刻参考输入和输出。
神经元的输出为:
2、实验方法和手段:
应用最优二次型性能指标学习算法进行仿真研究,ξ(k)为在100个采样时间的外加干扰,ξ(100)=0.10,输入为阶跃响应信号rin(k)=1.0;
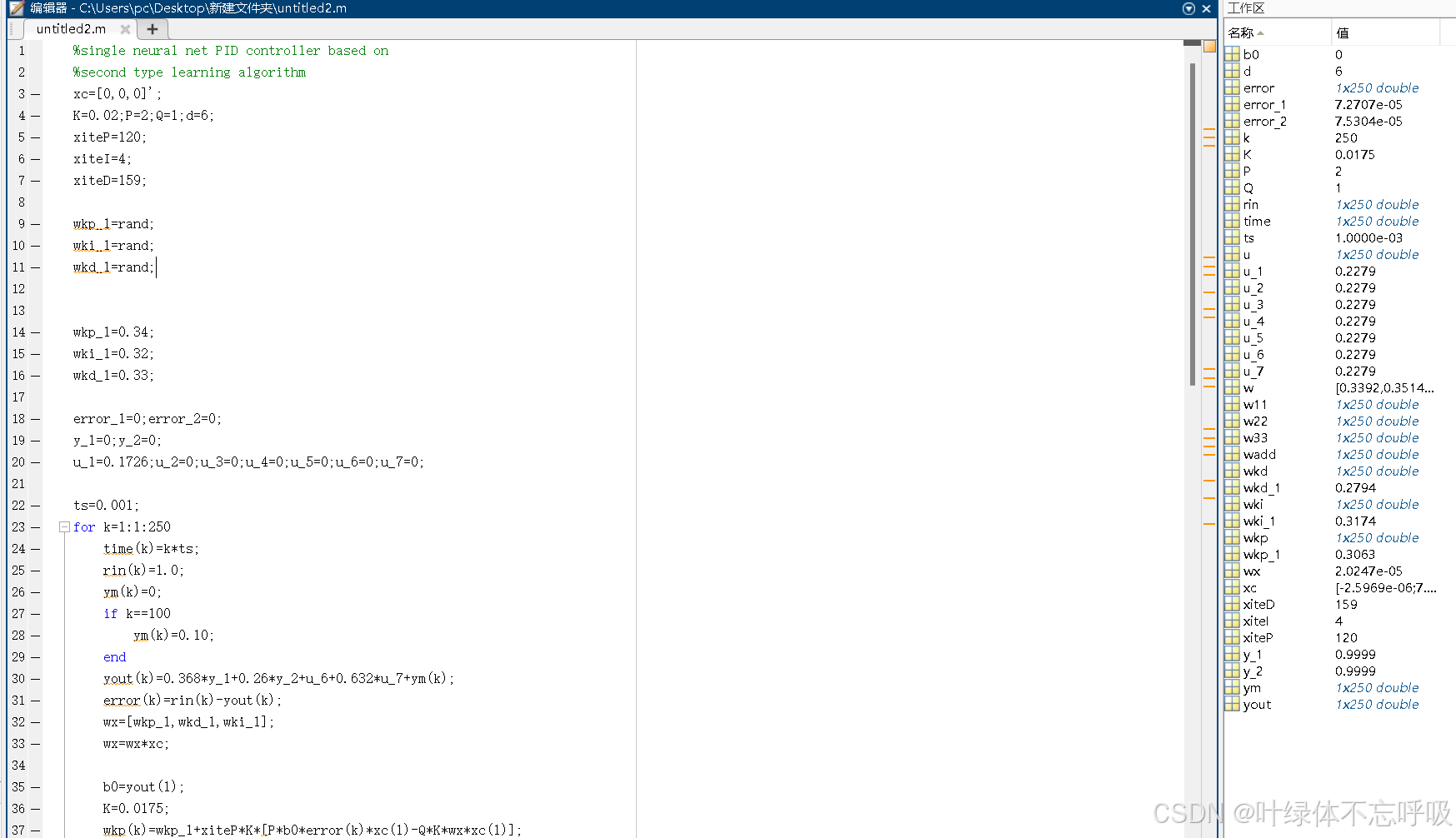
启动时采用开环控制,取u=0.1726,K=0.02,P=2,Q=1,d=6;
比例、积分、微分三部分加权系数学习速率分别取ηI=4,ηP=120,ηD=159,ω1(0)=0.34,ω2(0)=0.32,ω3(0)=0.33;
利用MATLAB编写仿真程序,得出神经元自适应PID跟踪及中权值变化结果。