一、无人机路径规划
无人机路径规划数学模型参考:
单目标应用:基于蛇群优化算法(SO)的无人机(UAV)三维路径规划 (mianbaoduo.com)
二、海鸥优化算法
海鸥优化算法参考文献:
李大华,聂前,田禾,付文成,杜洋.改进海鸥优化算法在光伏系统MPPT中的应用[J].电源技术,2022,46(05):556-559.

三、数值实验
8个障碍物信息以及起始点信息:
R1=80; % Radius 80
x1 = 400; y1 = 500; z1 = 100; % center
R2=70; % Radius 70
x2 = 600; y2 = 200; z2 = 150; % center
R3=80; % Radius 80
x3 = 500; y3 = 350; z3 = 150; % center
R4=70; % Radius 70
x4 = 350; y4 = 200; z4 = 150; % center
R5=70; % Radius 70
x5 = 700; y5 = 550; z5 = 150; % center
R6=80; % Radius 80
x6 = 650; y6 = 750; z6 = 150; % center
R7=100; % Radius 100
x7 = 750; y7 = 350; z7 = 150; % center
R8=50; % Radius 50
x8 = 300; y8 = 350; z8 = 150; % center
% Start and end position
start_location = [200;100;150];
end_location = [800;800;150];
部分代码:
close all
clear
clc
dbstop if all error
global model
model = CreateModel(); % Create search map and parameters
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);
pop=50;
maxgen=50;
[fMin , bestX,Convergence_curve ] = SOA(pop, maxgen,Xmin,Xmax,dim,fobj);
% save bestX bestX
% load('bestX.mat');
BestPosition = SphericalToCart(bestX);
PlotSolution(BestPosition);
figure
plot(Convergence_curve)
xlabel('Iteration');
ylabel('Best Cost');
grid on;
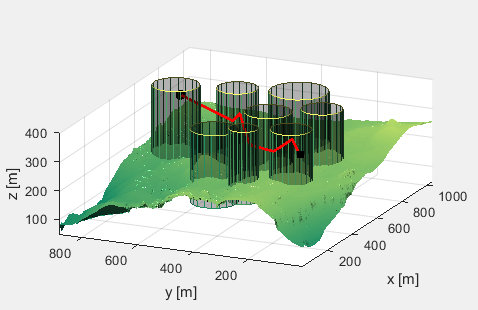
其中一次的求解结果:黑色正方形为起点,黑色圆圈为终点。

四、参考代码
文件夹内包含所有代码,可以直接运行。