DAB专题(十三)【独家】全网最全基于DAB变换器的传统pid控制和线性自抗扰控制(LADRC)对比仿真研究(仿真模型+说明文档+参考文献)
PID和ADRC的区别在于,PID利用积分项给系统升阶,估计和补偿总扰动;ADRC克服了积分器的缺点,对总扰动进行全程估计和补偿。
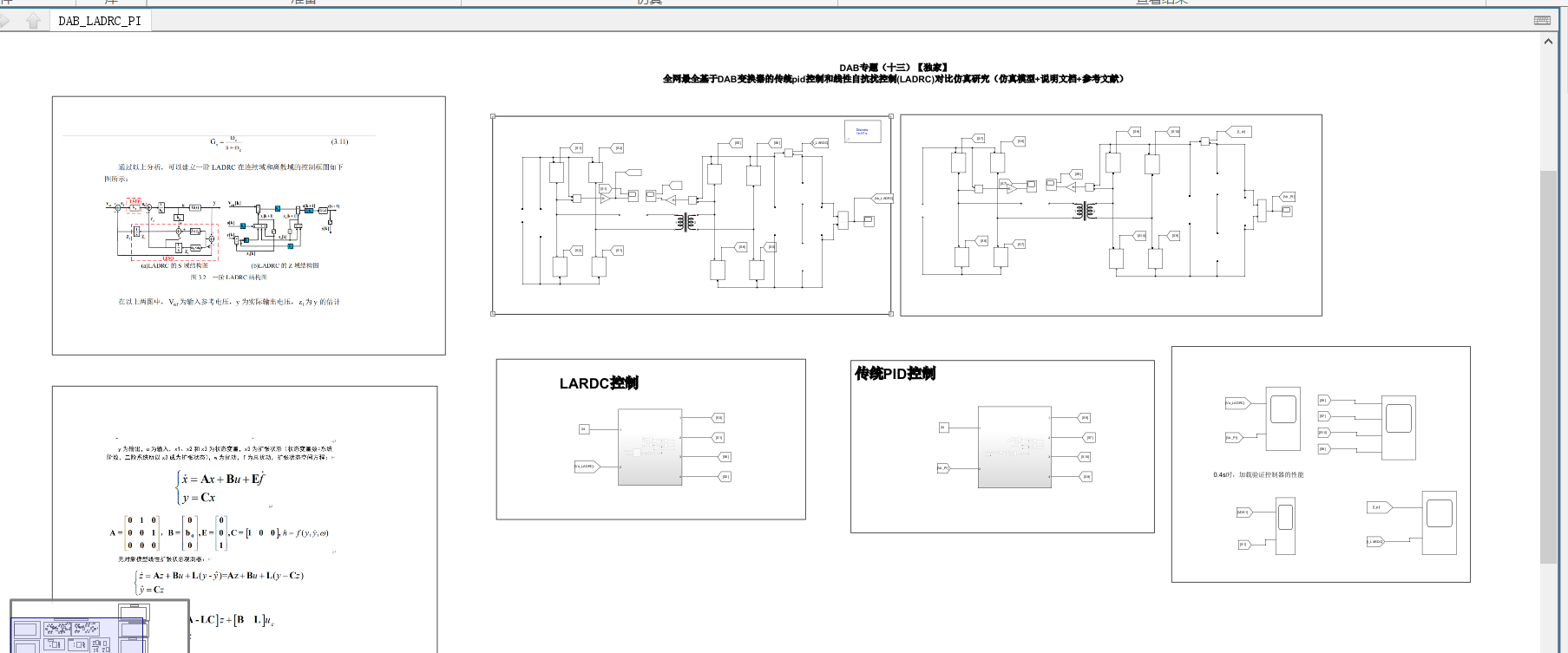
LADRC算法
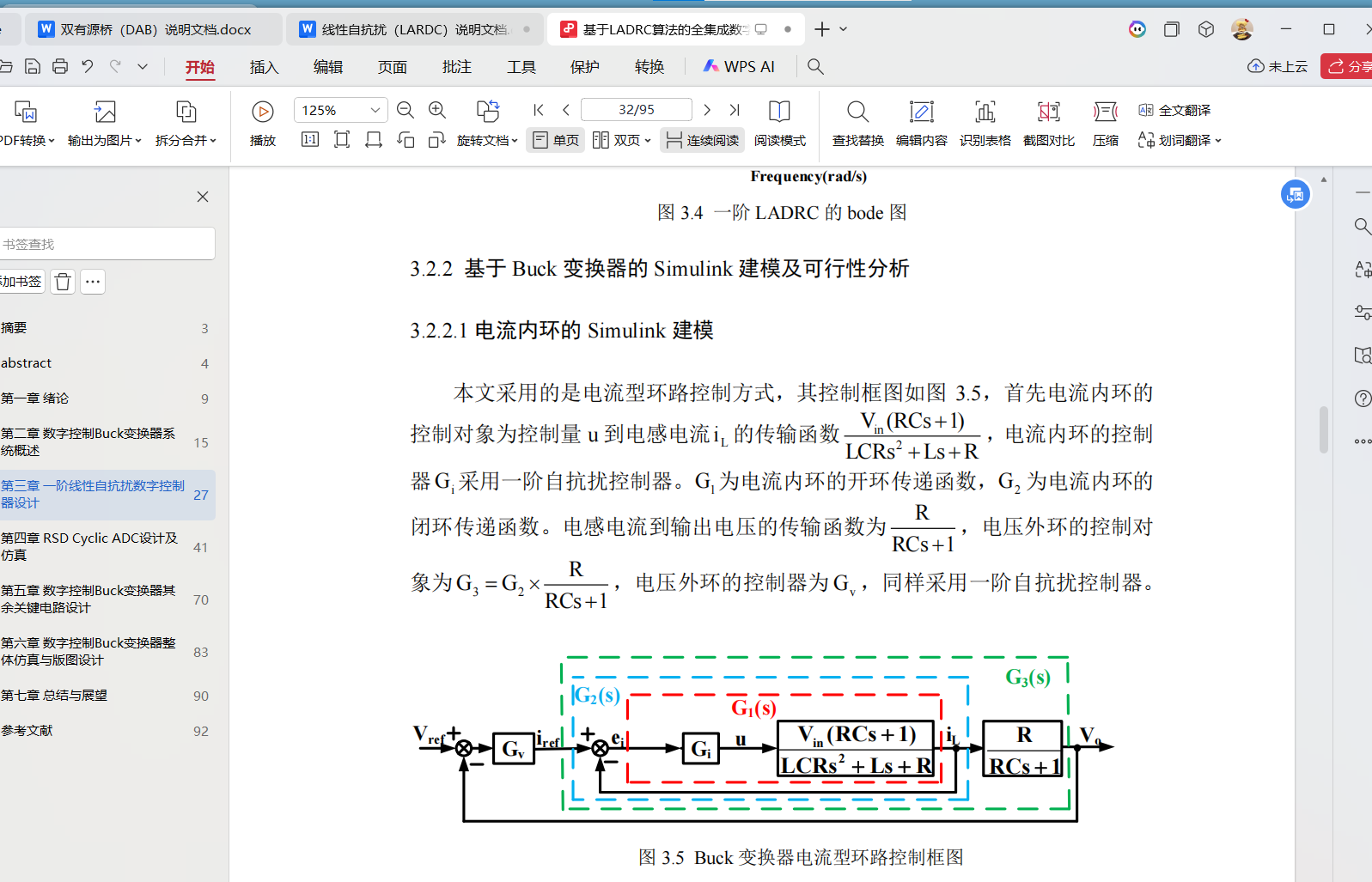
自抗扰控制(ADRC,Active Disturbance Rejection Control)是由韩京清先生提出的一种不依赖对象模型的控制算法,针对ADRC参数整定困难问题,高志强教授提出线性自抗扰控制(LADRC),将ADRC参数与控制器和观测器的频率联系起来,把参数整定问题转化为带宽调节问题。
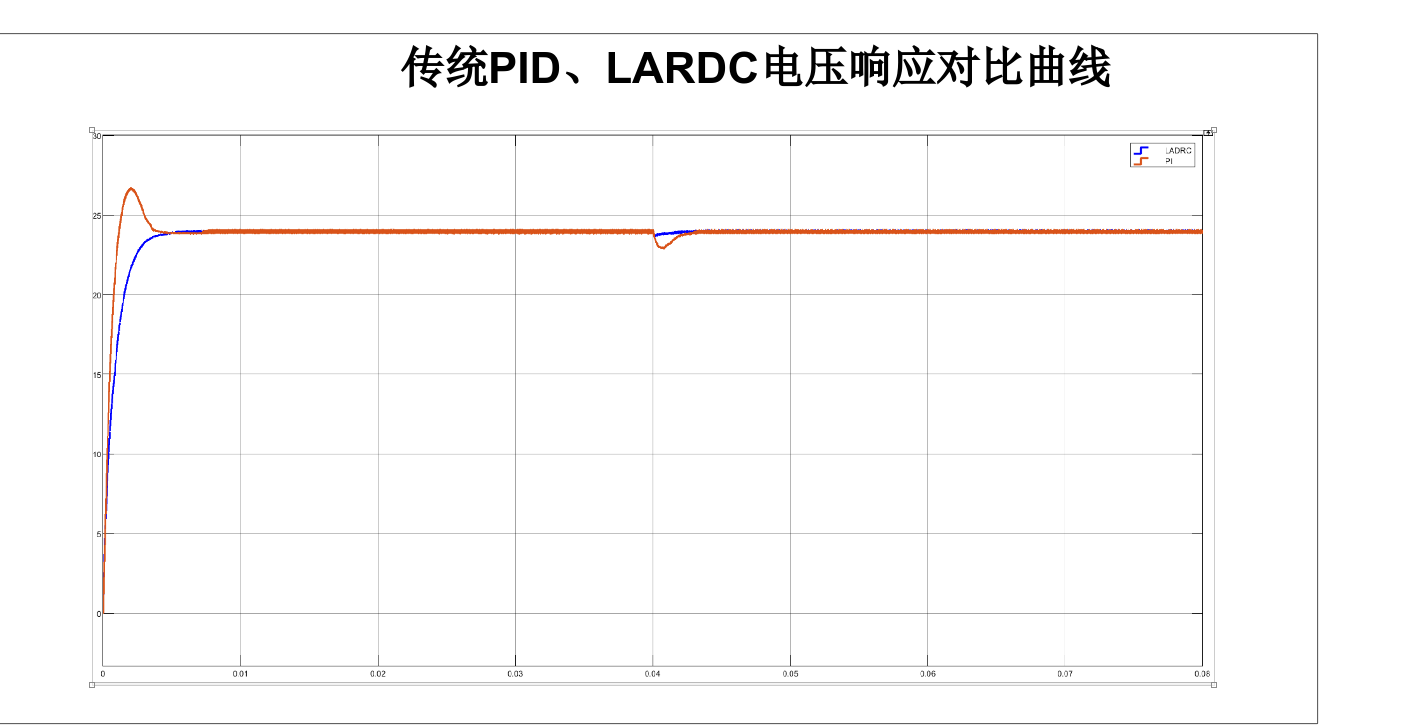
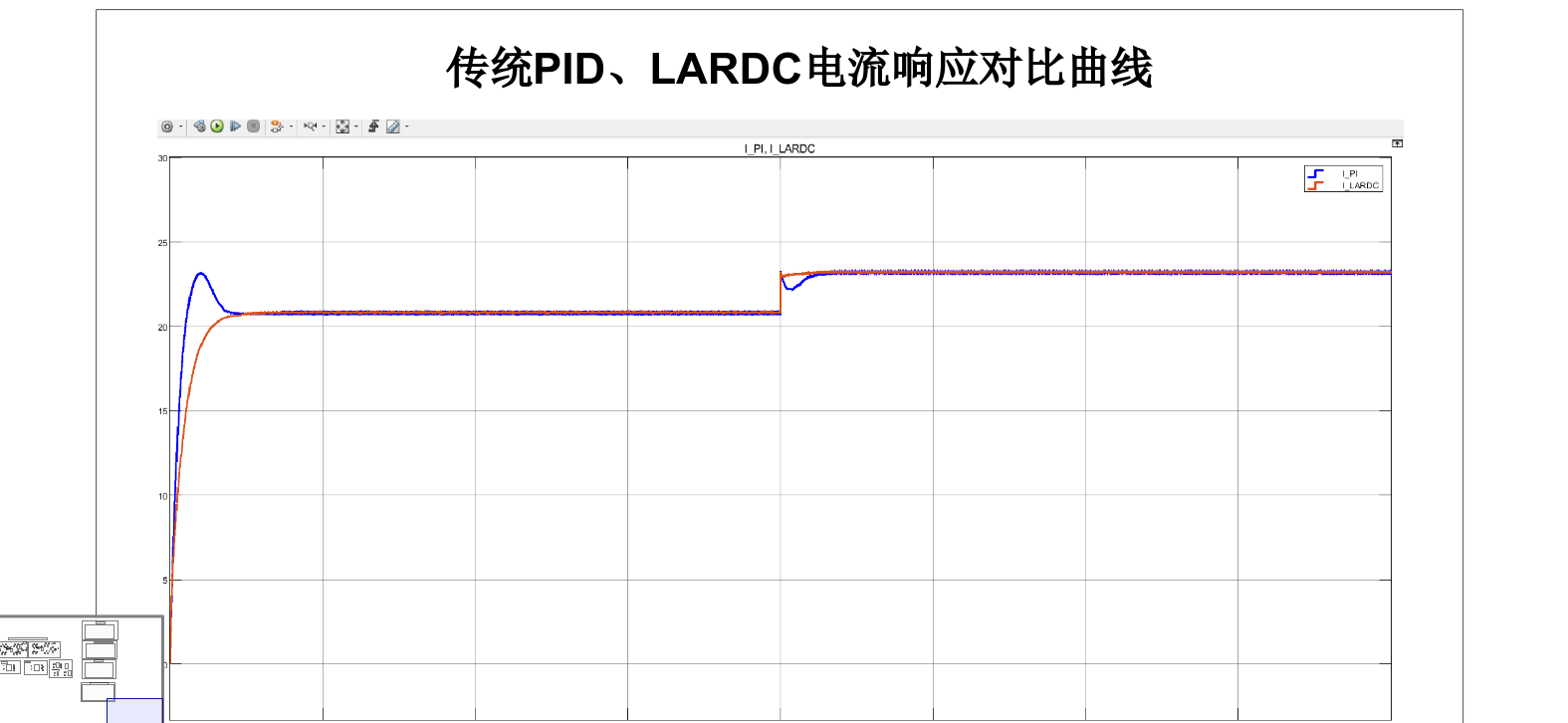
本文将LARDC引入了我们的DAB变换器的控制中,改进了传统PID控制,提出了LARDC_PI控制,进一步改进了DAB变换器的动态响应,效果十分优秀,适合学习使用。
参考文献:

说明文档:

仿真模型: