电机专题 (三十六) 【独家】全网最全基于模糊PID控制实现的无刷直流电机(BLDCM)的调速研究仿真(仿真模型+说明论文+使用注意事项+绘图代码)
摘 要:无刷直流电机(BLDCM)与常用电机(步进电机、直流电机、伺服电机和直线电机等)相比较,具有功率密度大、效率高、噪声低和转速-转矩性能好等优点,因此其在伺服控制系统中扮演着越来越重要的角色,进而也使得它被广泛地应用于工业和日常生活之中。
但是常规的无刷直流电机控制系统通过霍尔传感器来检测转子的位置常规的BLDCM电机控制是PID控制,但是传统PID控制在无刷直流电机控制上的存在动静稳定性不足等问题,于是使用MATLAB软件对无刷直流电机控制系统进行仿真,建立传统PID控制器与模糊控制器,作用在无刷直流电机控制系统中,比较模糊PID控制的控制效果;得到较优的控制策略.
关键词: 无刷直流电机;PID;模糊PID
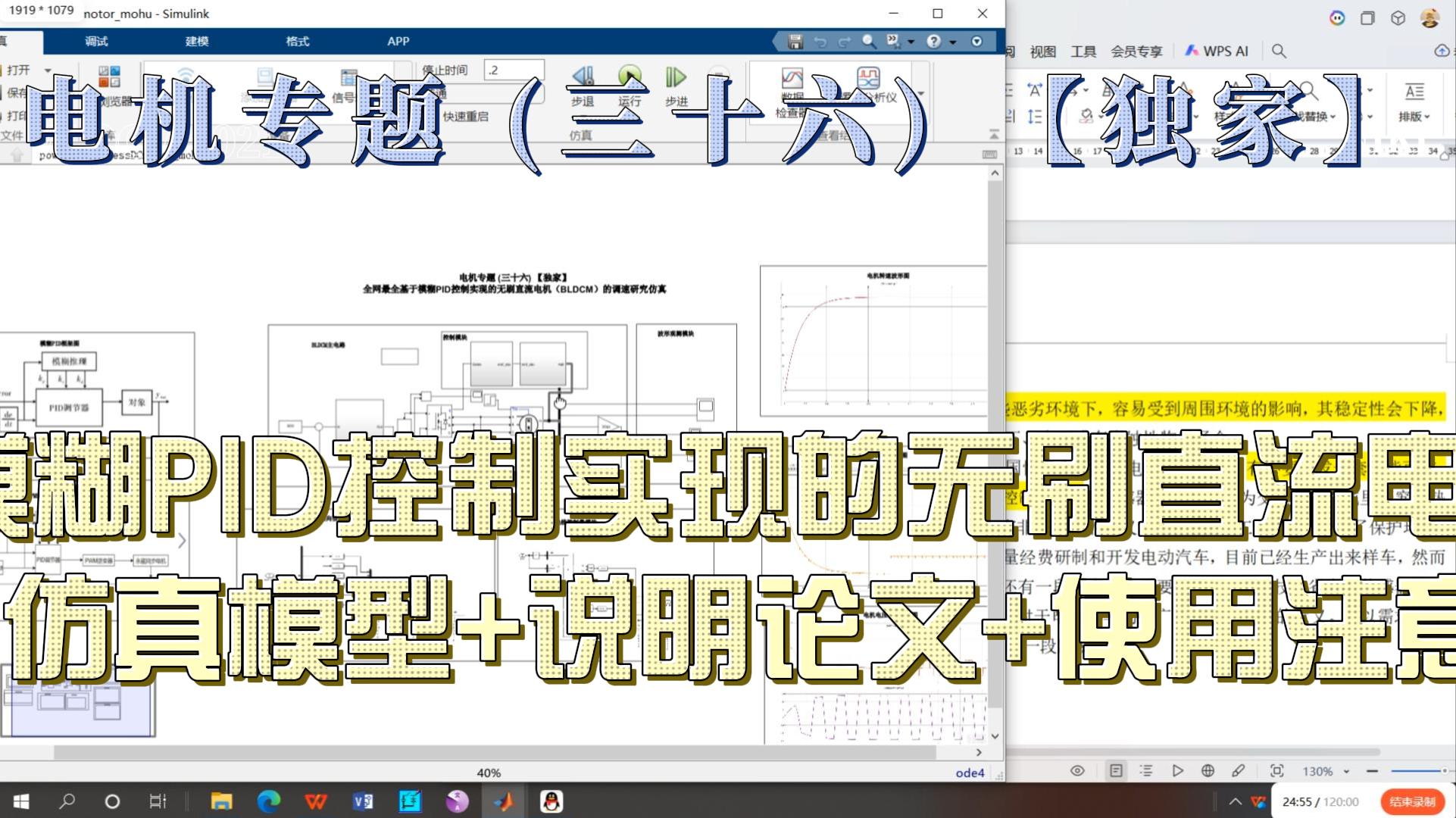

仿真模型:
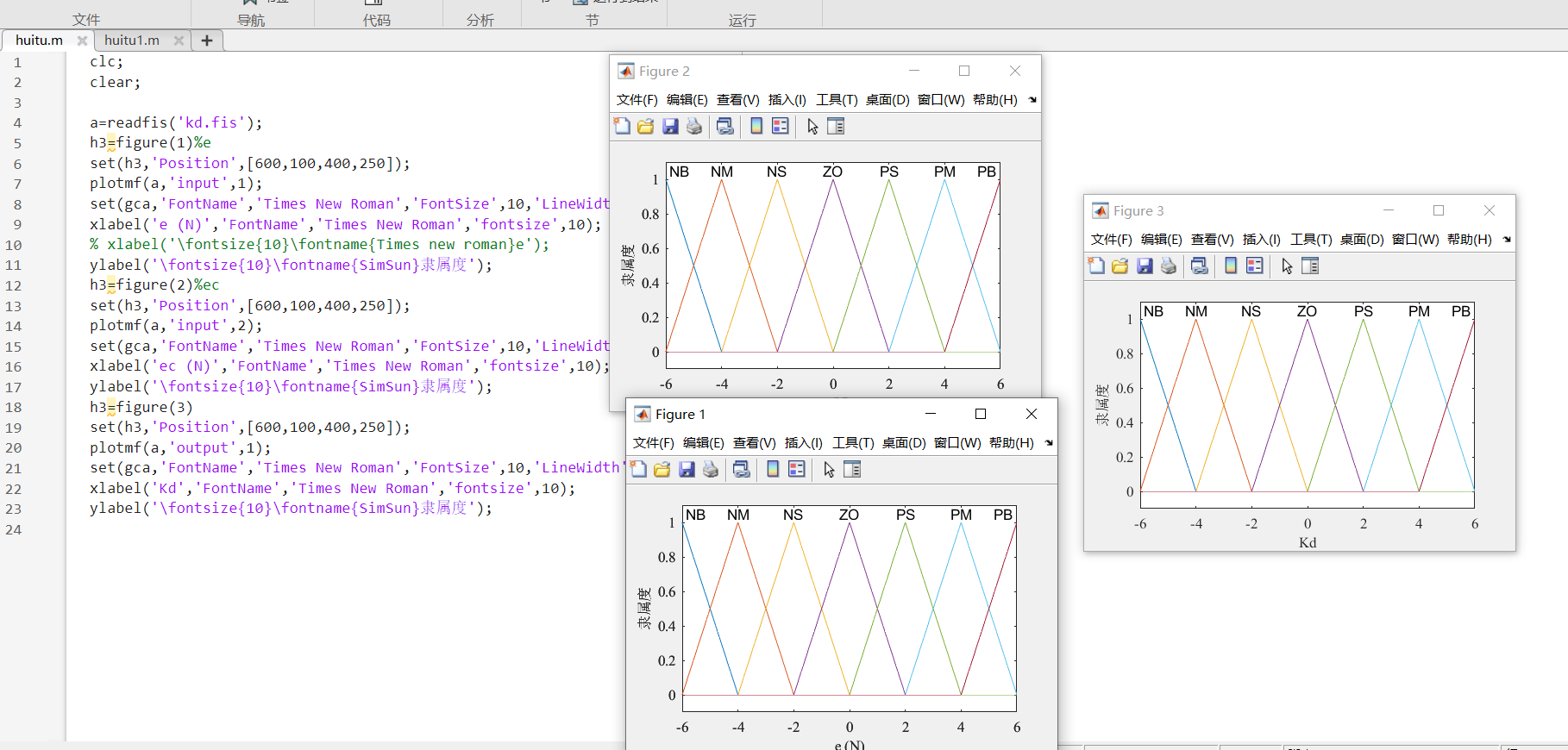
隶属度函数绘图代码:
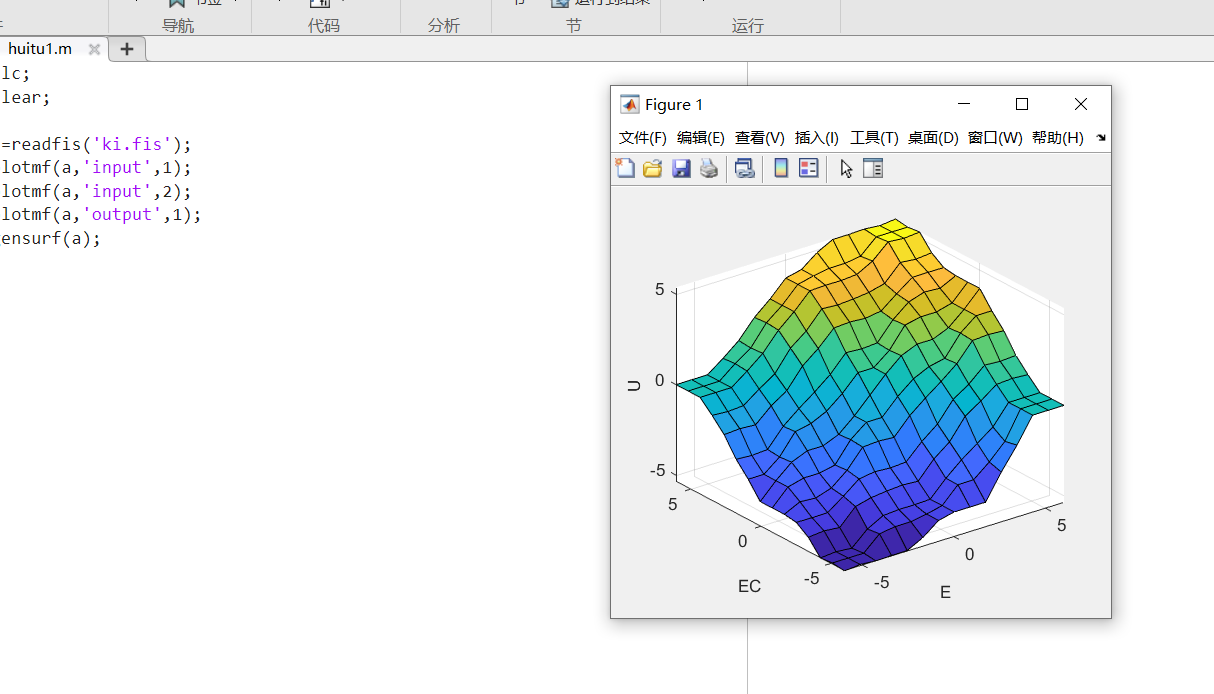

使用注意事项:
(1)运行前,注意MATLAB版本,本程序在2022b下运行调试。
(2)运行时
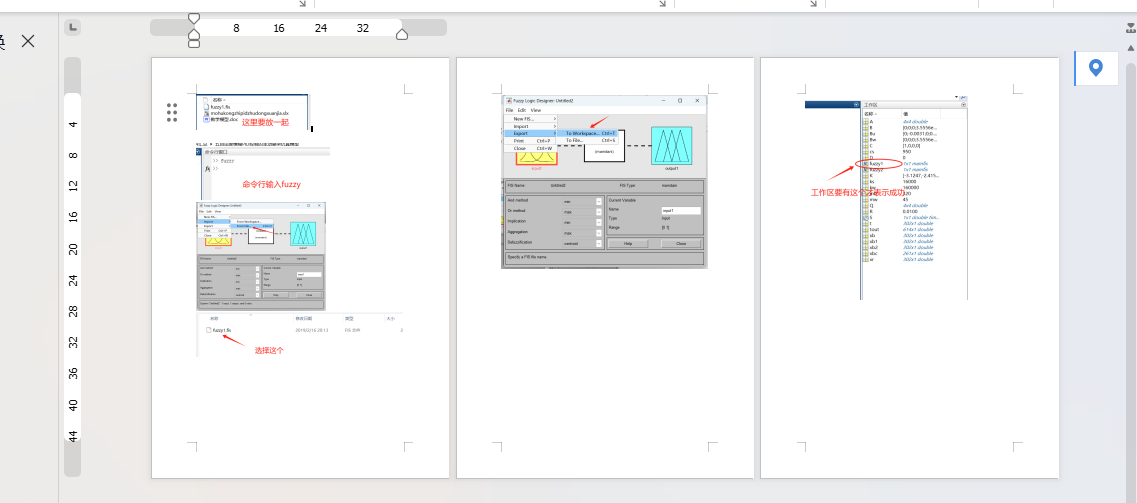
第一步将模糊推理器内容送到Workspace中
调用模糊推理器过程:
Command window 中输入fuzzy
FIS Editor 界面中1.File - Import- Form file -kp.kis(simulink模块调用的Fuzzy Logic Controller模糊推理器名称)
File - Export- To Workspace
2.File - Import- Form file -ki.kis(simulink模块调用的Fuzzy Logic Controller模糊推理器名称)
File - Export- To Workspace
4.File - Import- Form file -kd.kis(simulink模块调用的Fuzzy Logic Controller模糊推理器名称)
File - Export- To Workspace
第二步 准备工作做好以后,就可以点击运行按钮,执行程序仿真。
使用教程:
仿真模型:
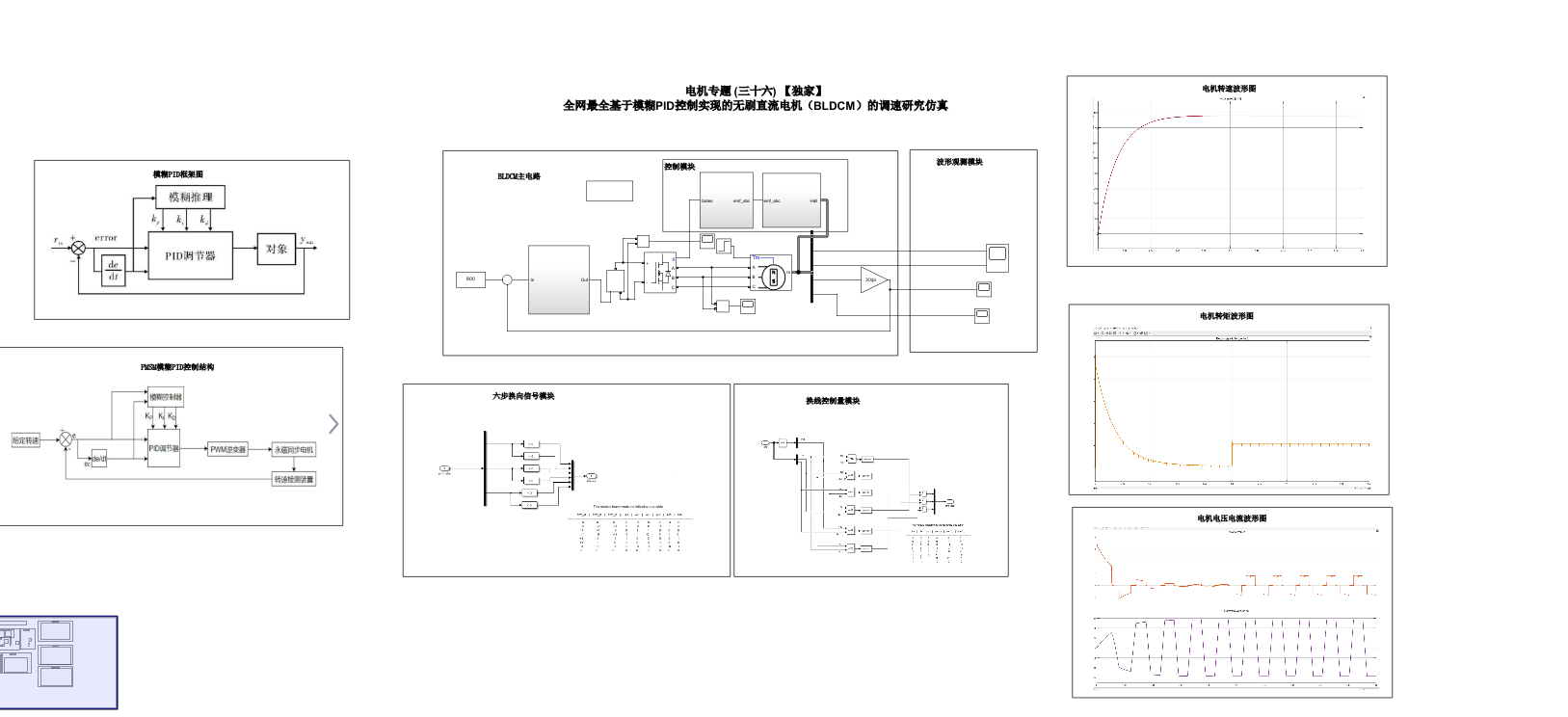
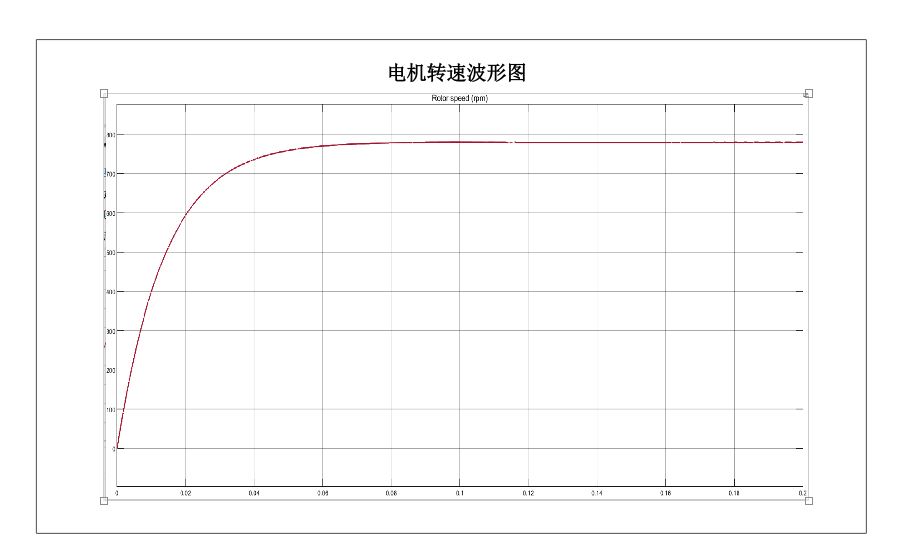
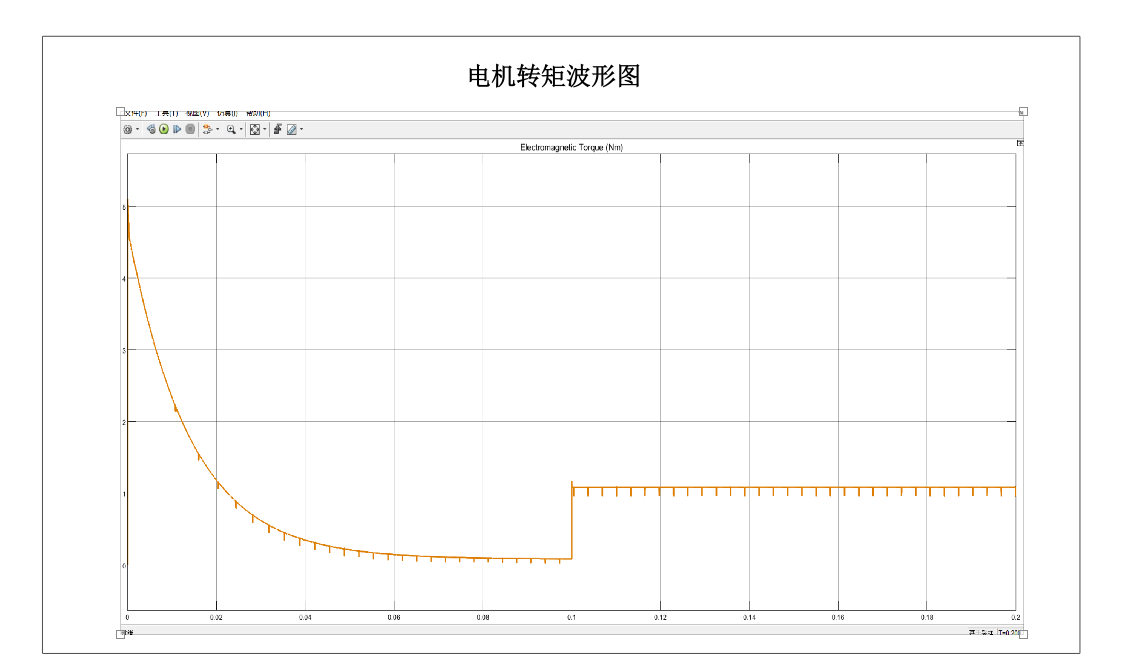
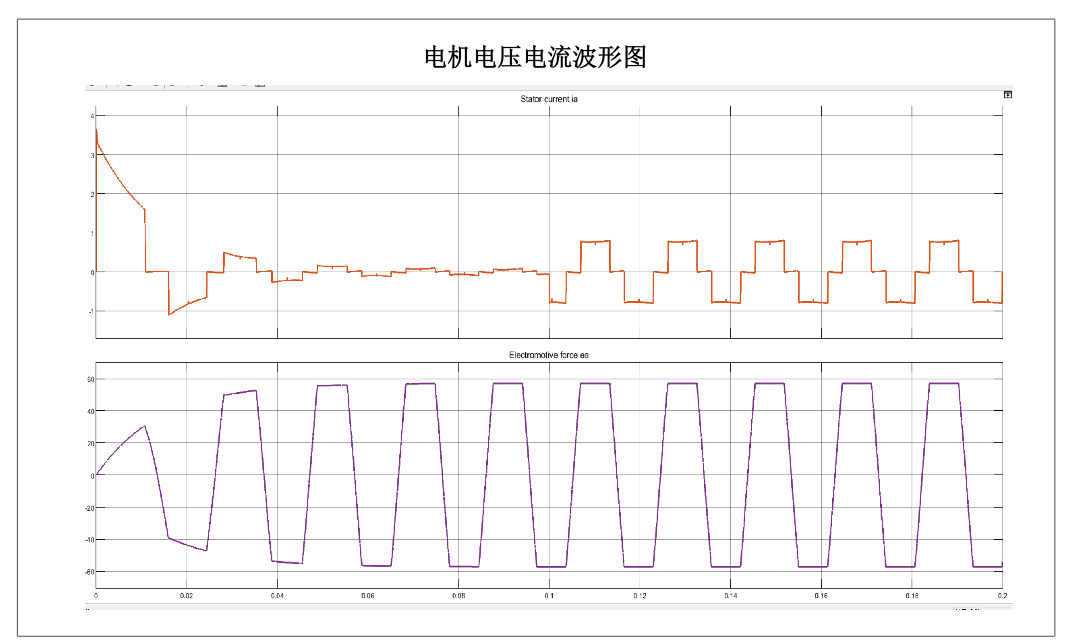
由图可以看出:电机转速在模糊PID控制策略下转速平滑且快速达到稳定的状态,且电机在0.1时增加负载,抗干扰能力很强,几乎没有转速下降,且反电动势和电流波形更加平滑,由此可见模糊控制BLDCM达到了预期的效果,具有较好的控制电机的性能,并具有较好的动静稳定性。
8000字论文说明: