本文所述的代码实现了交互多模型(IMM)算法,通过融合三个运动模型(匀速CV/匀速转弯CT/当前统计CS)实现对机动目标的鲁棒跟踪。可以显著提升复杂轨迹跟踪精度。
程序概述
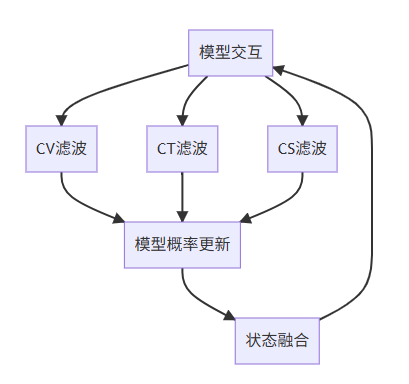
核心算法原理
IMM框架流程:
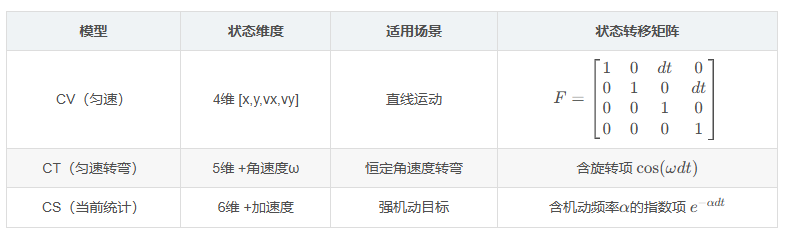
模型特性对比:
代码亮点解析
多模型状态交互
function[x_CV, x_CT, x_CS, P_CV, P_CT, P_CS]=IMM_Interaction(...)% 状态混合 x_CV =mu_mix(1,1)*x_CV +mu_mix(1,2)*x_CT(1:4)+mu_mix(1,3)*x_CS(1:4);
实现模型间状态信息的概率加权交换
复合轨迹生成
ift(k)<40% 匀速段elseift(k)<50% 左转段(CT模型)else% 强机动段(CS模型)true_acc(k,:)=[0.4+0.1*sin(0.5*t(k)),...];
生成包含匀速、转弯、强机动的复杂测试轨迹
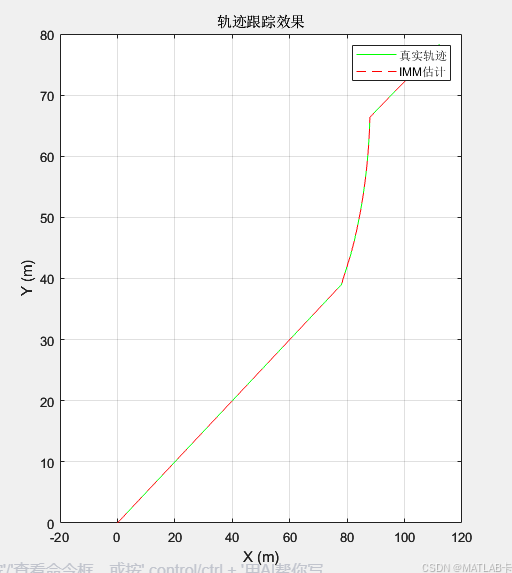
运行结果
轨迹:
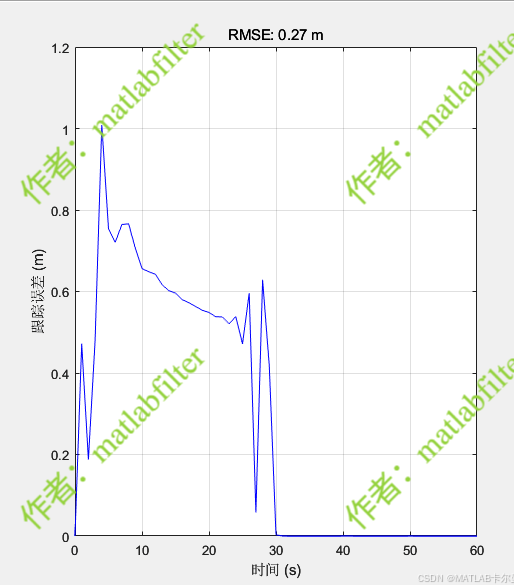
误差曲线:
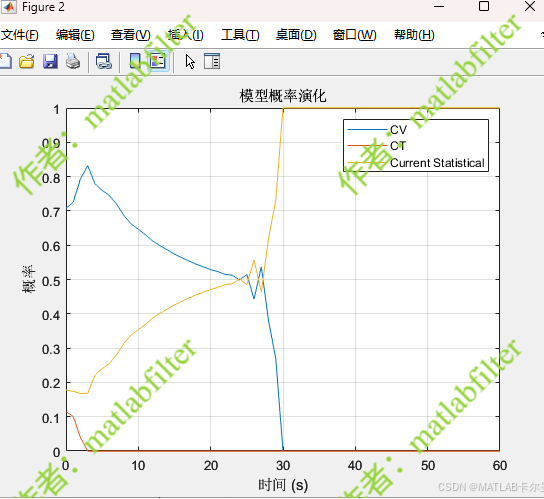
三个模型的概率曲线:
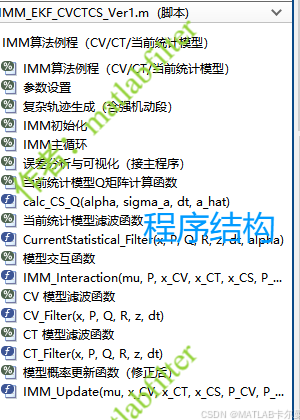
MATLAB源代码
程序结构
如需帮助,或有导航、定位滤波相关的代码定制需求,请联系作者微信:matlabfilter