代码功能概述
本文所述代码实现了一个基于水下超短基线(USBL)的三维目标定位仿真系统,通过方位角(θ)、俯仰角(φ)和斜距(r)的直接测量值进行坐标系转换,生成目标轨迹并评估定位误差。其核心功能包括:
- 目标运动建模
- :生成螺旋下降轨迹
- 传感器噪声模拟
- :添加方位角、俯仰角、测距的高斯噪声
- 极坐标-笛卡尔坐标转换
- :实现USBL定位核心算法
- 三维可视化与误差分析
- :轨迹对比及误差曲线绘制
关键技术解析
坐标系定义与转换
% 极坐标转局部坐标系公式 x_local = r *cos(phi)*cos(theta); y_local = r *cos(phi)*sin(theta); z_local = r *sin(phi);
该转换过程体现了三维球坐标系到笛卡尔坐标系的映射关系,符合几何声学定位原理。全局坐标系通过叠加传感器位置实现平移变换。
目标运动模型
% 螺旋下降轨迹参数 pos_true(1,:)=50*sin(0.1*t);% X轴正弦运动(水平方向振幅50m) pos_true(2,:)=50*cos(0.1*t);% Y轴余弦运动(圆周半径50m) pos_true(3,:)=-100-0.5*t;% Z轴匀速下降(初始深度100m,速率0.5m/s)
该模型模拟了水下航行器典型的三维机动模式,水平面做圆周扫描,垂直方向缓速下潜。
噪声模型
- 方位角噪声
- :标准差1°(对应约17.45mrad)
- 俯仰角噪声
- :标准差1°
- 测距噪声
- :标准差0.5m
- 该噪声水平模拟了实际USBL系统中由声速剖面误差、多径效应等因素引起的测量不确定性。
性能分析指标
err =sqrt(sum((pos_true - measured_xyz).^2,1));
通过计算欧氏距离误差,代码输出以下关键指标:
- 平均误差
- :反映系统整体定位精度
- 最大误差
- :评估极端情况下的误差边界
- 标准差
- :表征误差分布的离散程度
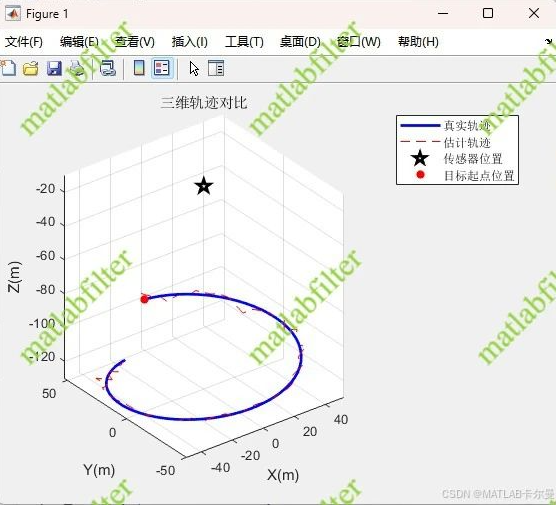
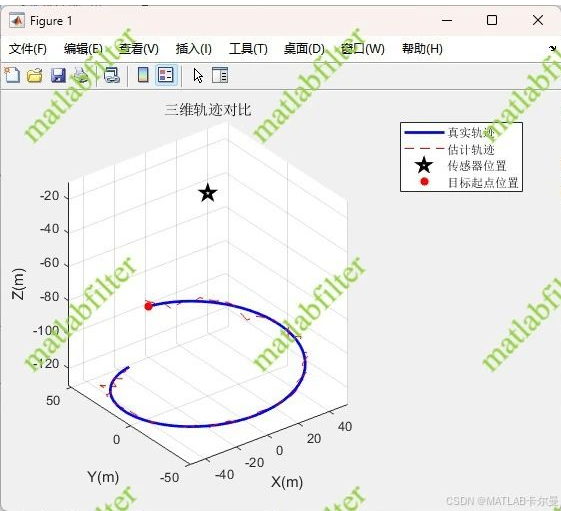
运行结果
定位示意图(目标运动轨迹为螺旋下降):
误差曲线图: