付费后,使用电脑网页打开作品链接,点击弹出下载按键进行下载
包括程序操作录像+参考文献+matlab2024b下载链接
1.软件版本
matlab2024b
2.运行方法
使用matlab2024b或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
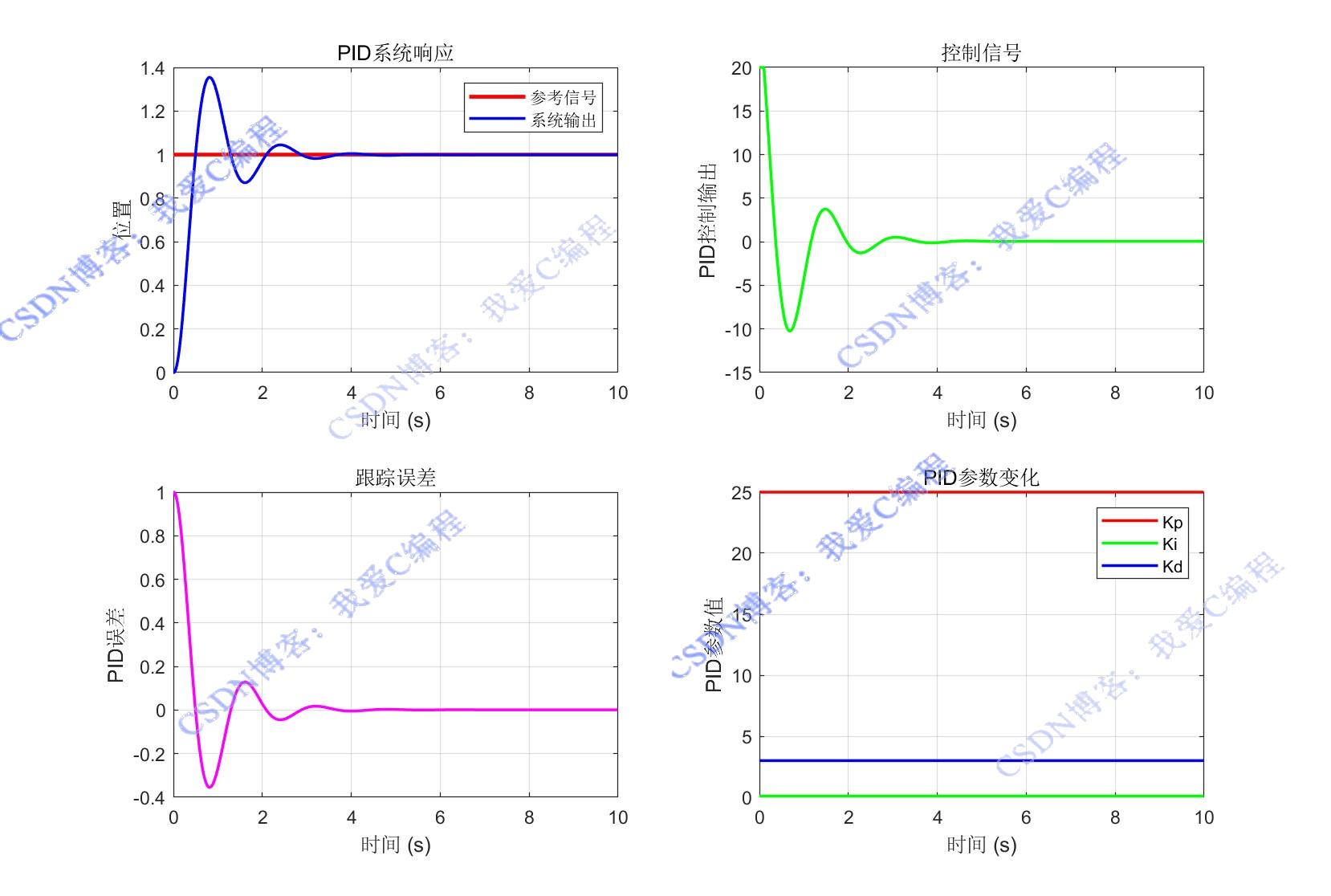
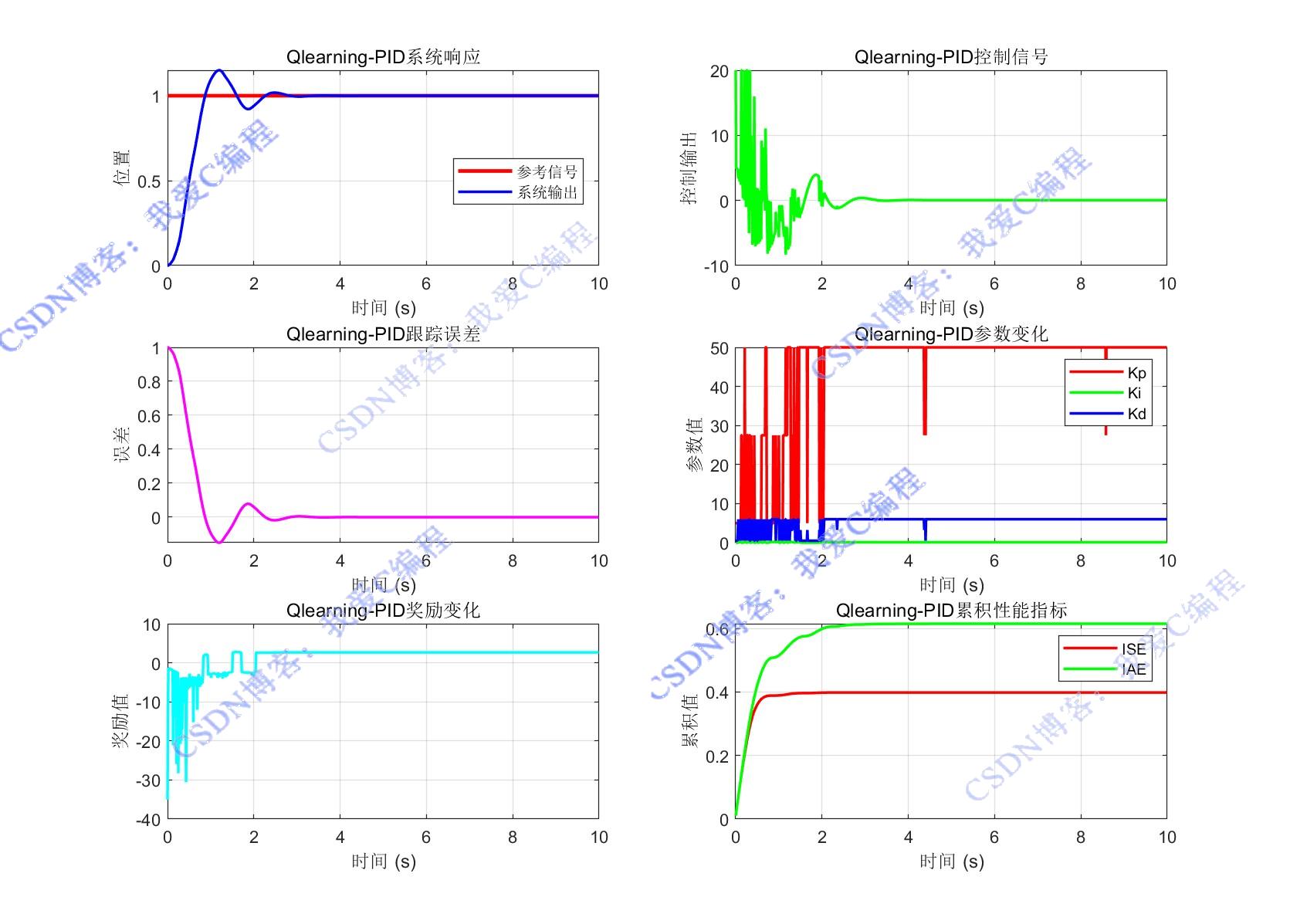
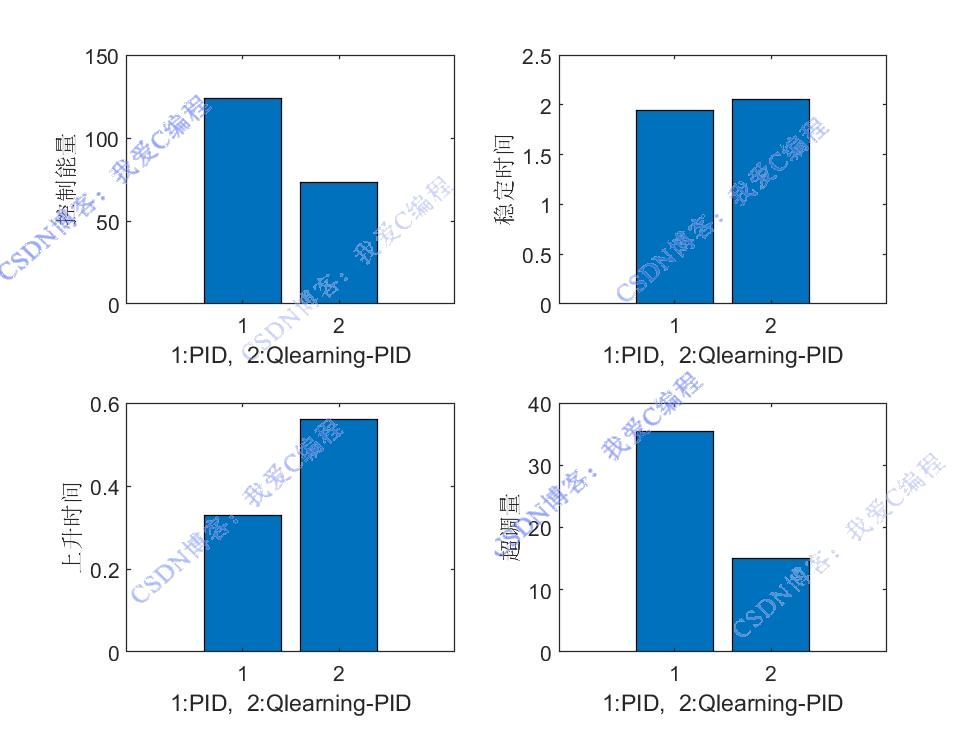
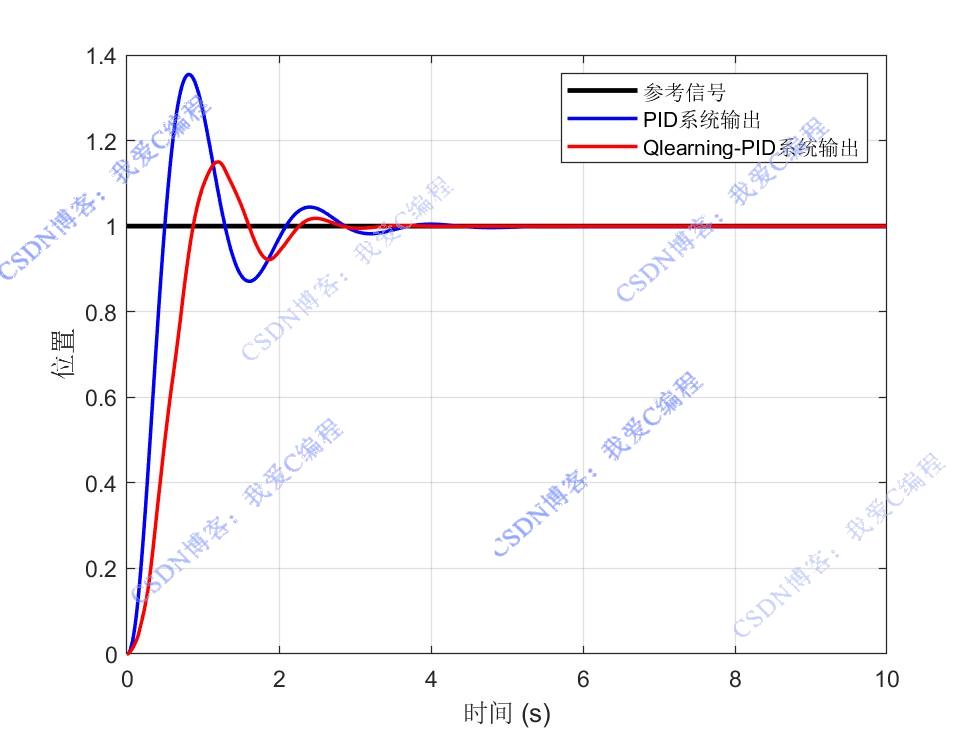
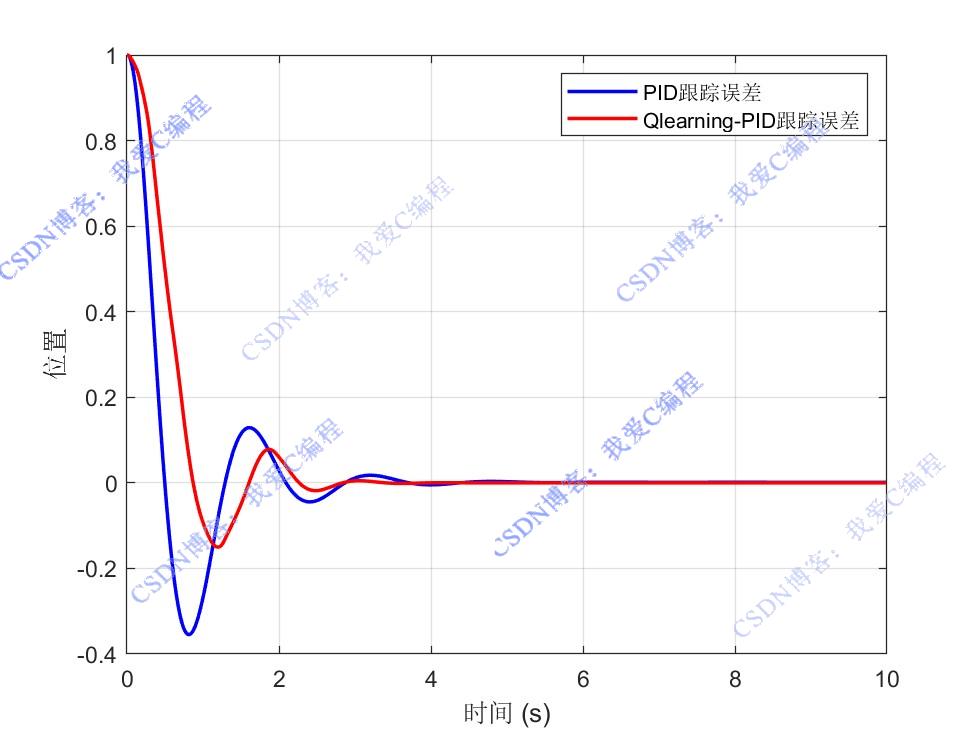
3.部分仿真截图
4.内容简介
基于Q-Learning的PID控制器通过强化学习的自适应优化能力,突破了传统PID参数整定的局限性,为复杂系统控制提供了高效解决方案。其核心在于将 PID 参数调整建模为马尔可夫决策过程(MDP),通过状态 - 动作 - 奖励的闭环交互学习最优控制策略。尽管存在计算复杂度高和离散化限制等问题,但其在工业控制、机器人、无人机等领域的成功应用已彰显巨大潜力。随着深度强化学习、连续空间算法的发展,未来该技术有望进一步提升实时性和泛化能力,推动智能控制技术向更广泛的工程场景渗透。