1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
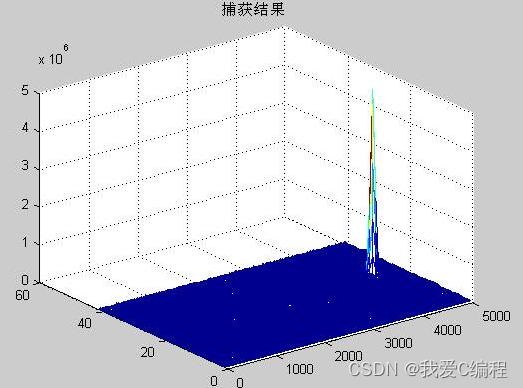
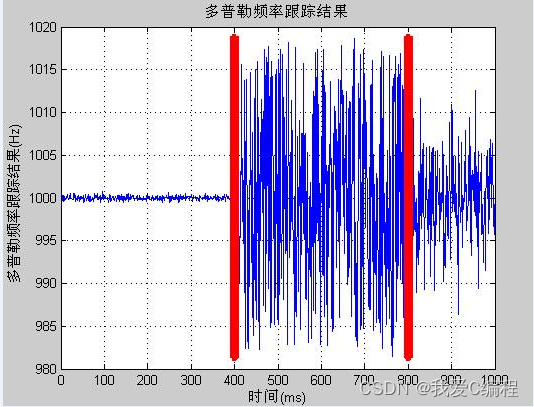
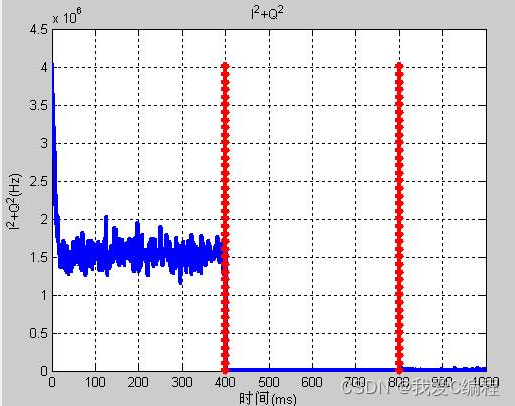
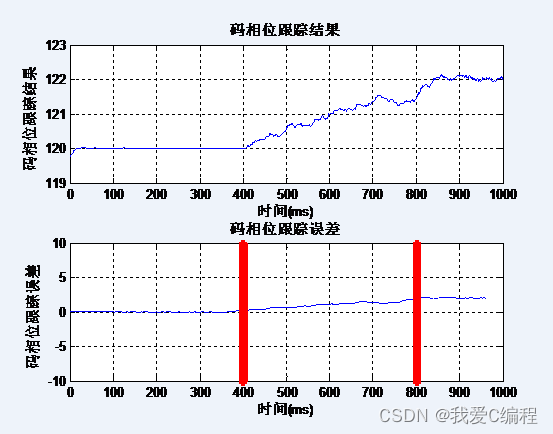
3.部分仿真截图
4.内容简介
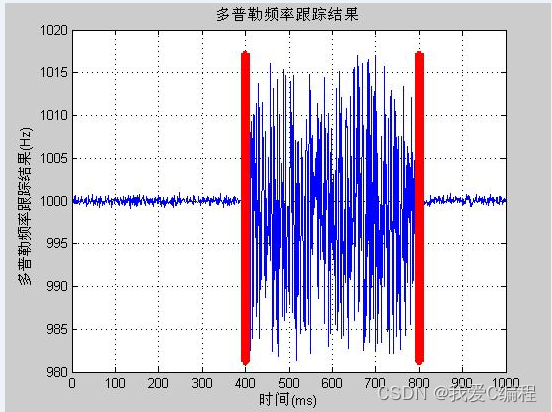
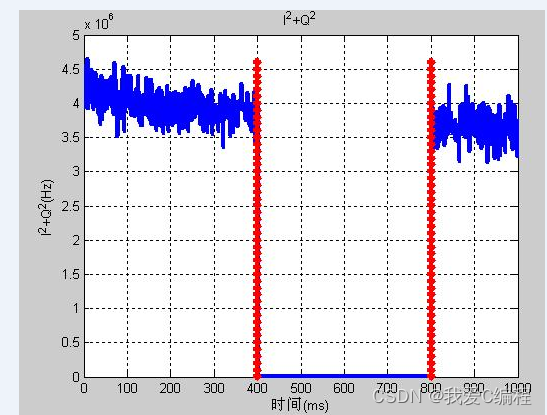
载波跟踪环是传统独立式GPS接收机最脆弱的环节,针对弱信号环境下其比伪码跟踪环路更容易失锁的问题,给出一种基于矢量频率锁定环(vector-frequency lock loop,VFLL)的载波跟踪方法。给出VFLL理论推导及实现过程,并以最小二乘估计方法证明VFLL在载波跟踪性能上优于频率锁定环(frequency lock loop,FLL)。静止场景时9颗卫星实验结果显示,本文给出的方法能够实现14 dB/Hz微弱GPS信号的载波跟踪。
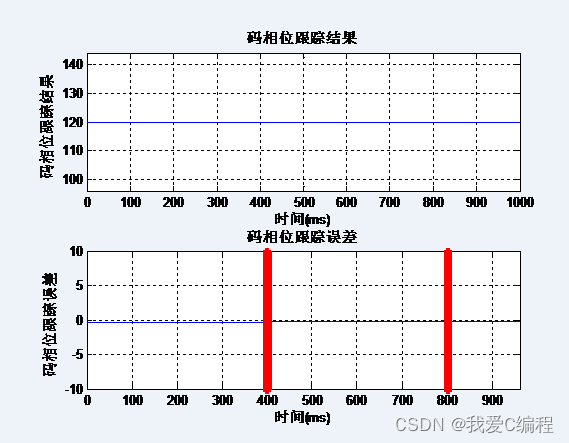
提出的VDLL(vector delay lock loop)方法直接估计用户位置信息,由于用户物理动态有限,与传统的独立通道码环相比,跟踪的维度和带宽都更小,所以该方法具有更强的鲁棒性.阐述了VDLL与传统独立通道码跟踪环的本质区别,建立了VDLL的非线性系统模型,推导了系统观测量与传输延迟估计误差的具体线性化关系,确立了观测误差方差矩阵的计算公式;然后对非线性系统模型进行线性化,给出了多卫星联合跟踪下用户位置更新的EKF(extended Kalman filte-ring)滤波算法.