1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
3.部分仿真截图
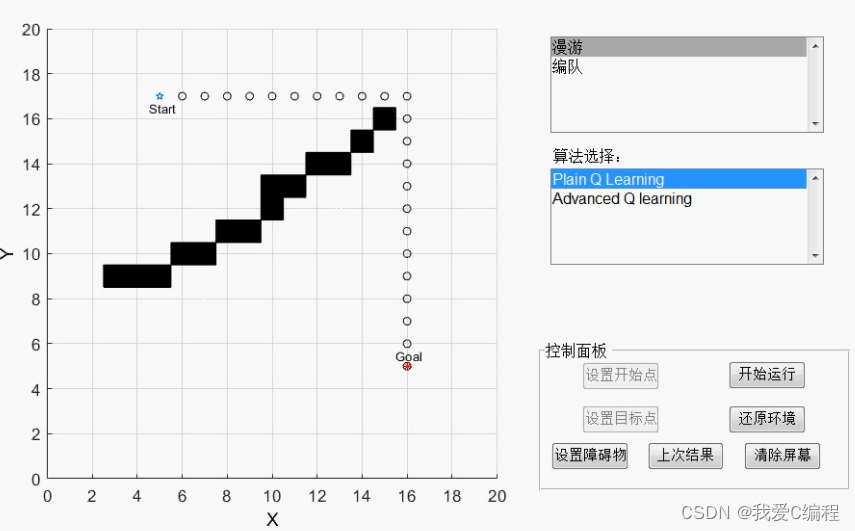
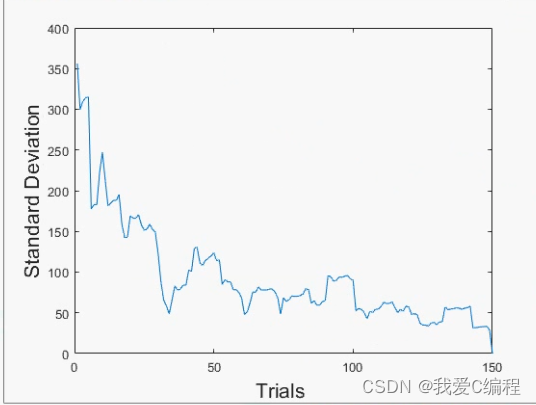
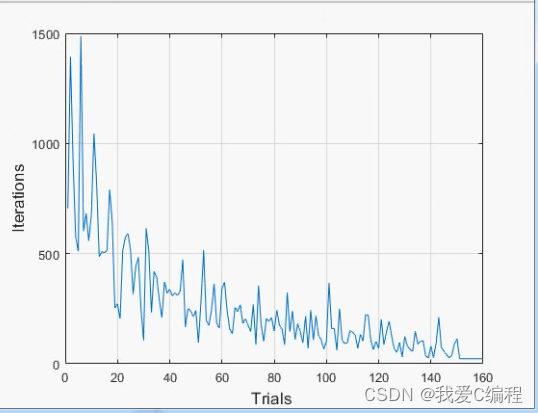
4.内容简介
①强化学习是做出最佳决策的科学。它可以帮助我们制定活的物种所表现出的奖励动机行为。比方说,你想让一个孩子坐下来学习考试。要做到这一点非常困难,但是如果每次完成一章/主题时都给他一块巧克力,他就会明白,如果他继续学习,他会得到更多的巧克力棒。所以他会有一些学习考试的动机。
②孩子代表着Agent代理 。奖励制度和考试代表了Environment环境。今天的题目是类似于强化学习的States状态。所以,孩子必须决定哪些话题更重要(即计算每种行为的价值)。这将是我们的工作的 Value-Function价值方程。所以,每次他从一个国家到另一个国家旅行时,他都会得到Reward奖励,他用来在时间内完成主题的方法就是我们的Policy决策。
Q-Learning它是强化学习中的一种 values-based 算法,是以QTable表格形式体现,在学习中遇到的任何操作存入QTable中,根据之前的学习选择当前最优操作,也可以根据设置的e_greedy机率随机选择。

Q-Learning的QTable标签更新公式:
Q-Learning的计算步骤:
1.判断在当前位置可以有几种操作;
2.根据当前位置允许的操作选择一个操作;
3.根据选择的操作进行奖赏;
4.修改当前行为的本次操作权重;