1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
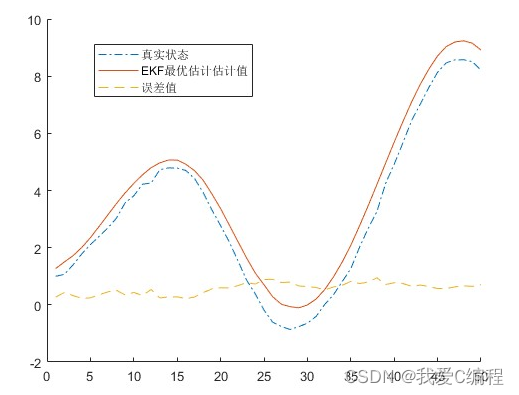
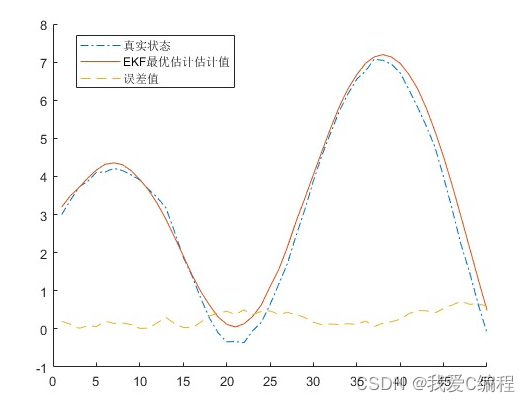
3.部分仿真截图
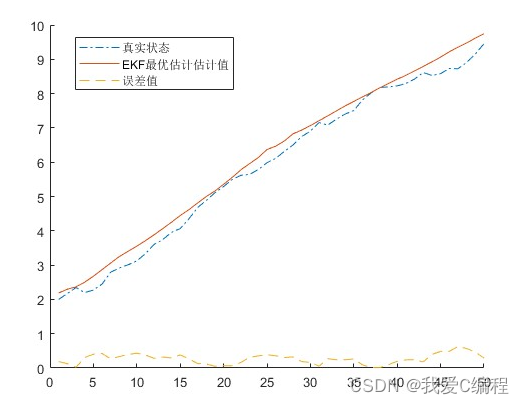
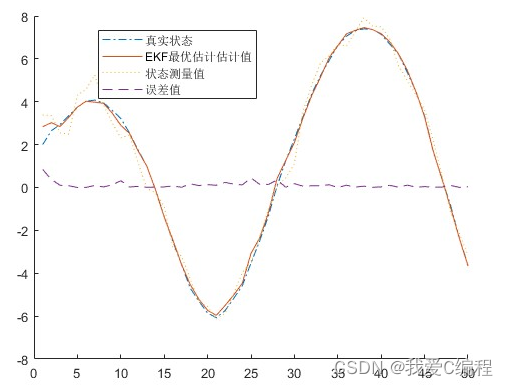
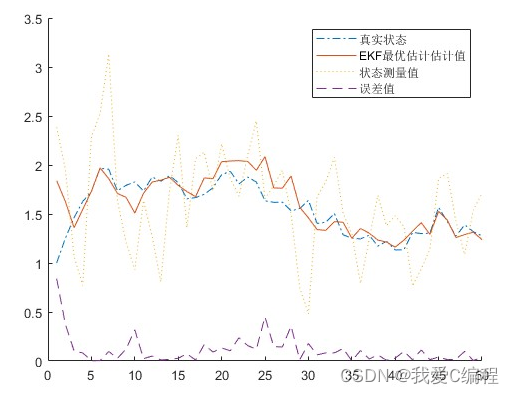
卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器),它能够从一系列的不完全包含噪声的测量中,估计动态系统的状态。这种滤波方法以它的发明者鲁道夫·E·卡尔曼(Rudolf E. Kalman)命名。卡尔曼最初提出的滤波理论只适用于线性系统。Bucy,Sunahara等人提出并研究了扩展卡尔曼滤波(EKF),将卡尔曼滤波理论进一步应用到非线性领域。
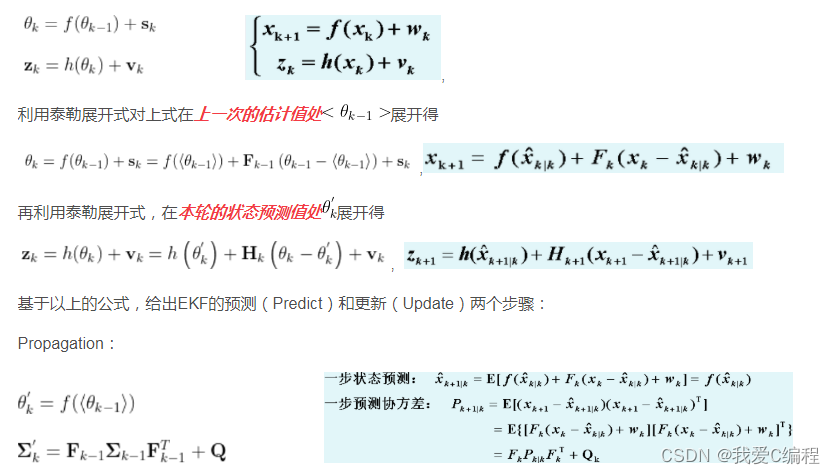
扩展卡尔曼滤波(Extended Kalman Filter,EKF)是标准卡尔曼滤波在非线性情形下的一种扩展形式,EKF算法是将非线性函数进行泰勒展开,省略高阶项,保留展开项的一阶项,以此来实现非线性函数线性化,最后通过卡尔曼滤波算法近似计算系统的状态估计值和方差估计值,对信号进行滤波。
扩展卡尔曼滤波EKF的状态转移方程和观测方程为:
![]() 编辑
编辑
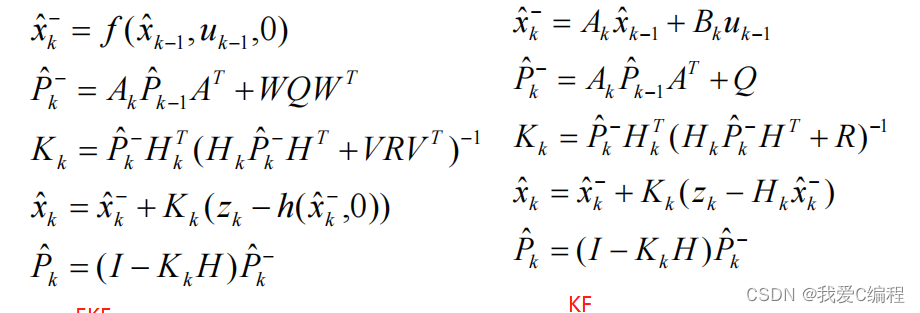
EKF和KF的区别如下:
![]() 编辑
编辑
姿态解算就是通过融合传感器数据解算出姿态角。姿态角是俯仰角(pitch)、滚转角(roll)和偏航角(yaw)的合称,此文分别使用 α , β , γ \alpha, \beta, \gammaα,β,γ 表示。
俯仰角
俯仰角是无人机机体系 x 轴与水平面夹角,也即机体系与航向系 x 轴的夹角,机头上仰为正,范围 α ∈ [ − π / 2 , π / 2 ] \alpha \in [-\pi/2, \pi/2]α∈[−π/2,π/2]。
滚转角
滚转角是无人机机体系 y 轴与水平面夹角,也即机体系与航向系 y 轴的夹角,机身左升右降为正,范围 β ∈ [ − π , π ] \beta \in [-\pi, \pi]β∈[−π,π]。
偏航角
偏航角是无人机机体系 x 轴在水平面投影与地球系 x 轴(正北方)的夹角,也即航向系 x 轴与地球系 x 轴夹角。俯视机身,顺时针方向(往东)角度递增,逆时针方向角度递减,范围 γ ∈ [ − π , π ] \gamma \in [-\pi, \pi]γ∈[−π,π]。
可见,引入航向系之后可以更加方便地定义姿态角。注意与下面的欧拉角作对比,欧拉角和姿态角不是同样概念,这也是这里使用 α , β , γ \alpha, \beta, \gammaα,β,γ 而不是更常见的 θ , ϕ , ψ \theta, \phi, \psiθ,ϕ,ψ 的原因,后者用于表示欧拉角。
4.内容简介
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑