1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
3.内容简介
T-S模糊模型是复杂非线性系统模糊建模中的一种典型的模糊动态模型,由Takagi 和Sugeno 于1985 年提出,其主要特点:前提部依据系统输入、输出间是否存在局部线性关系来进行划分,结论部由多项式线性方程来表达,从而构成各条规则间的线性组合,使非线性系统的全局输出具有良好的线性描述特性。模糊逻辑的设计不依赖被控对象的模型,但却非常依赖专家经验和知识。模糊逻辑的优点:能将人的控制经验通过模糊规则融入控制器中,通过设计模糊规则,实现高水平的控制器设计。
T-S模糊模型分为2种类型,一型T-S模糊系统是表示光滑非线性系统的有力工具。一般地,两种方法可以获得一型T-S模糊模型。
第一种方法主要基于系统的输入-输出数据,并运用系统辨识算法获得一型T-S模糊模型。当无法获得非线性系统的数学模型,而系统的输入-输出数据又可以获得时,主要采用这一方法。
第二种建模方法主要适合于非线性系统数学模型已知的情形。当非线性系统的数学模型已经被建立,运用扇区非线性法或局部近似方法可以获得期望的一型T-S模糊模型。
在T-S模糊模型中,对于双输入、单输出的系统可以用F条件语句:

![]() 编辑
编辑
来叙述。输出量u是一个数值函数f(x1,x2)。
对于1阶ts模型F推理,设第i条规则为Ri,则:

![]() 编辑
编辑
其中和表示第i条规则中的两个模糊集合。其中pi,qi,ri都是第i条规则的中的常数,他们共同反映了系统的固有特性。当输入量xi激活m条模糊规则时,最终输出U将由这m条规则的输出ui决定
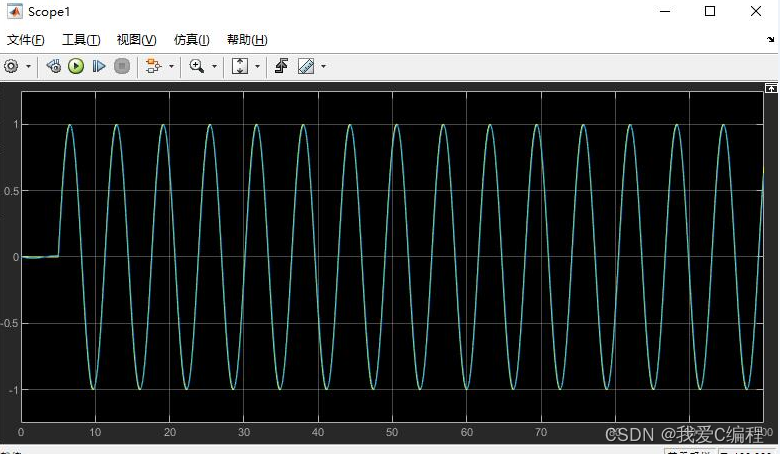
4.部分仿真截图
![]() 编辑
编辑