1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
3.内容简介
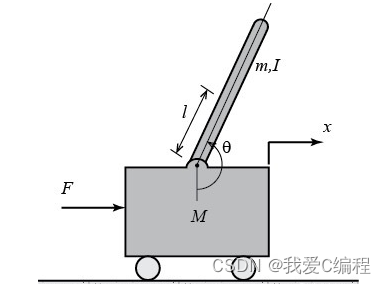
一个可以活动的小车上立着一根不稳定随时会倒下的杆。小车的轮子由电机控制,可以控制小车电机的转动力矩M。同时,也可以获取小车轮子转动的圈数N(可以精确到小数)和杆相对于垂直位置的倾角α.
不考虑车轮打滑, 小车所受力大小等于电机力矩乘车轮半径, 小车位置可以从转动圈数计算出, 小车可简化为最经典的一阶倒立摆:
![]() 编辑
编辑
对小车水平方向:
Mx¨+bx˙+N=F
对摆水平方向:
N=md2dt(x+lsinθ)
即:
N=mx¨+mlθ¨cosθ¨−mlθ˙2sinθ
对摆垂直方向:
P=mg+md2dt(lcosθ)
即:
P=mg−mlθ¨sinθ¨−mlθ˙2cosθ
关节力矩:
−Plsinθ−Nlcosθ=Iθ¨
令 ϕ=π+θ
在工作点 θ≈0 进行线性化: sinθ=0,cosθ=1,θ˙2=0 经过一顿操作化简之后能得到:
(I+ml2)ϕ¨−mglϕ=mlx¨ (M+m)x¨+bx˙−mlϕ¨=F=u
4.部分仿真截图
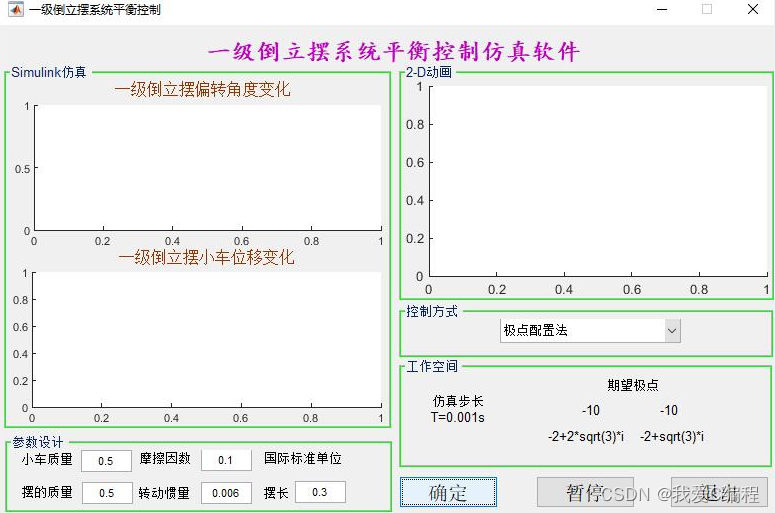
![]() 编辑
编辑
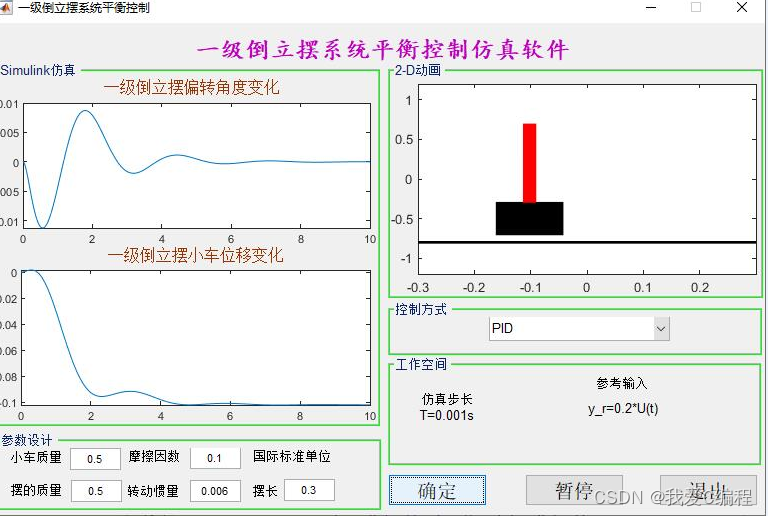
![]() 编辑
编辑