1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
3.内容简介
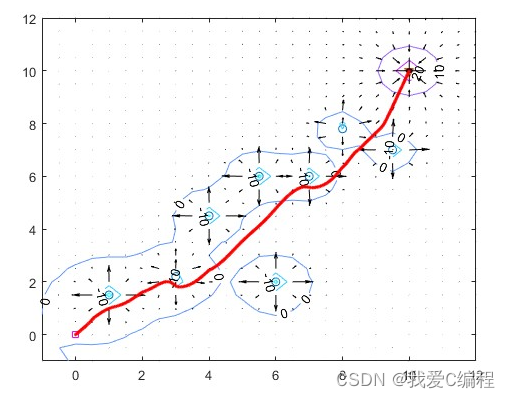
人工势场法路径规划是由Khatib提出的一种虚拟力法(Oussama Khatib,Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. Proc of The 1985 IEEE.)。它的基本思想是将机器人在周围环境中的运动,设计成一种抽象的人造引力场中的运动,目标点对移动机器人产生“引力”,障碍物对移动机器人产生“斥力”,最后通过求合力来控制移动机器人的运动。应用势场法规划出来的路径一般是比较平滑并且安全,但是这种方法存在局部最优点问题。
人工势场就像构建了一个吸铁石,包括引力场和斥力场。黑色为障碍物,箭头为智能体要运动的方向,目标点为“Goal”。智能体按照箭头的方向到达“Goal”,目标点像有着“吸引力”一样吸引着智能体靠近。而在障碍物附近,智能体逆着箭头的方向,好像对智能体产生“排斥力”。智能体前进的方向就是这两种力的合力的方向。

![]() 编辑
编辑

![]() 编辑
编辑
4.部分仿真截图
![]() 编辑
编辑