1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
3.内容简介
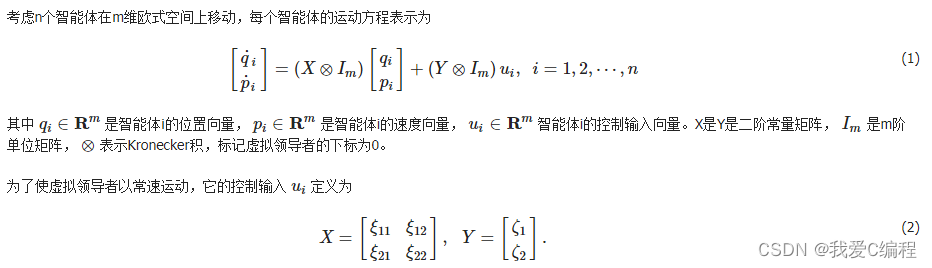
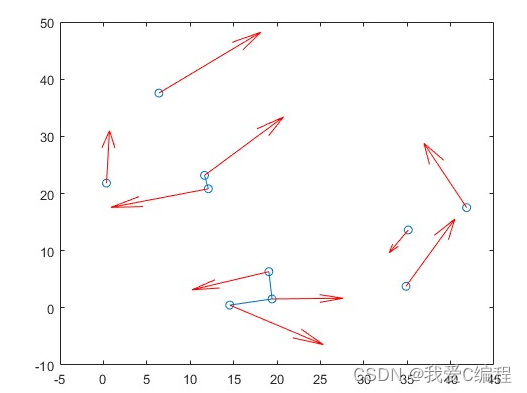
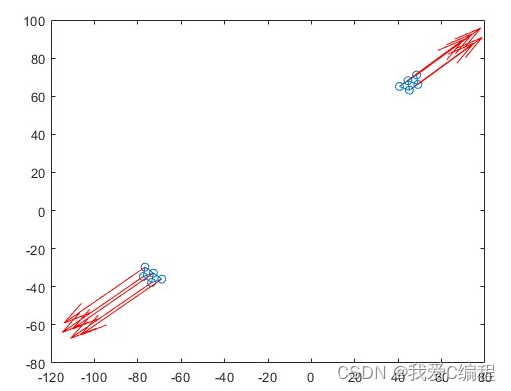
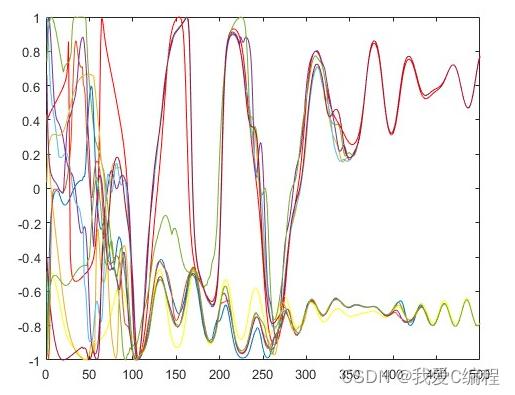
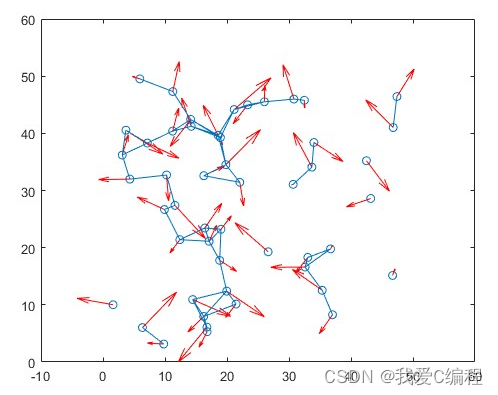
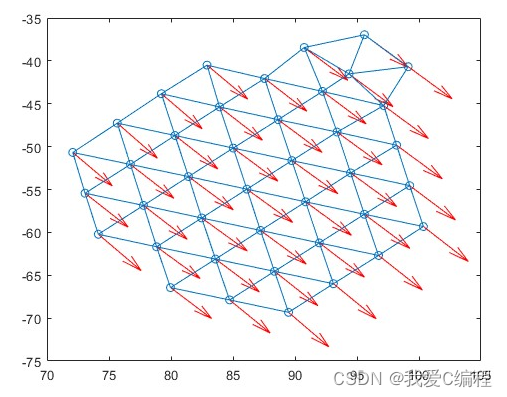
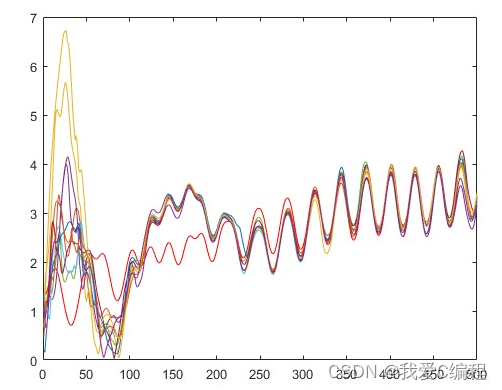
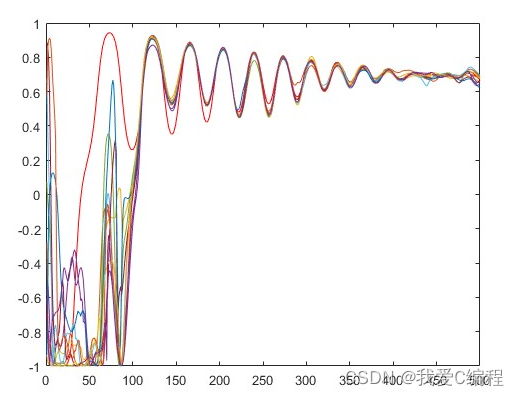
无人机集群以其高度的灵活性、广泛的适应性、可控的经济性,拥有越来越广泛的应用潜力,受到国内外的高度关注。任务规划是无人机集群应用的顶层规划,是根据任务环境态势、任务需求、自身特性等要求进行的综合调度,从而建立无人机与任务的合理映射关系,维持机间合理协同合作关系。本文从基于逻辑与规则的自上而下式任务规划和基于集群智能涌现的自下而上式任务规划两个方面,对无人机集群任务规划技术现状进行了全面的总结,分析了当前无人机集群任务规划技术研究应当关注的若干发展方向。针对多智能体蜂拥控制过程中个体间的差异性,在包含多个虚拟领导者的情况下,研究了针对多智能体个体差异性的优化蜂拥控制算法.首先,在Olfati-Saber算法避碰,聚合和速度匹配的基础上引入多智能体之间的质量差异策略,实现多智能体的聚合和速度匹配;其次,在多领导者的影响下,对引领反馈进行优化,研究了智能体个体跟踪多领导者的控制算法.最后,通过实验仿真,验证了基于改进Olfati-Saber算法的多智能体蜂拥控制算法可以实现多智能体蜂拥运动状态。
![]() 编辑
编辑
虚拟领导者可以看作是提前给定的预定路线,蜂拥控制的目的是多智能体不仅要达到蜂拥状态而且还要按照预定路线移动,如来自地面指挥员的命令。本文考虑了切换拓扑结构,因此把每个智能体的邻域可以看作是时间t的函数。两个智能体之间的距离超过感应半径时,它们之间的连边会断开,有可能整个多智能体网络会不连通。本文采用动态牵制策略达到多智能体网络蜂拥控制目标。
4.部分仿真截图
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑