1.软件版本
matlab2017b
2.运行方法
使用matlab2017b版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
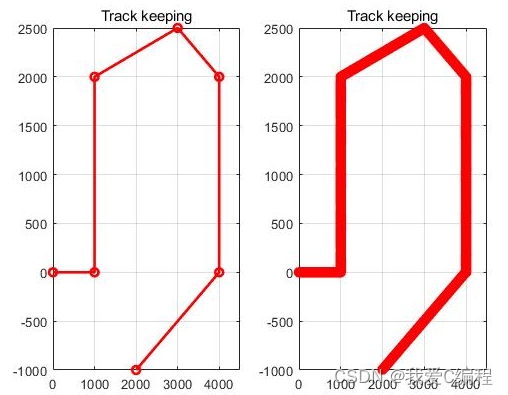
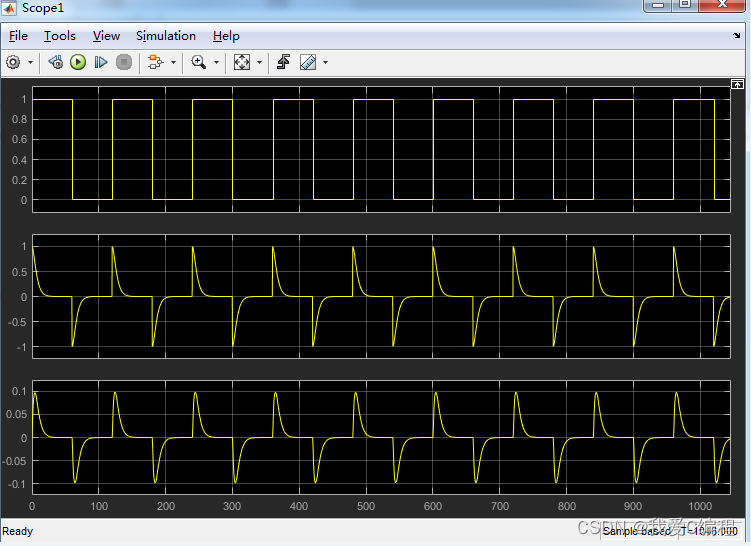
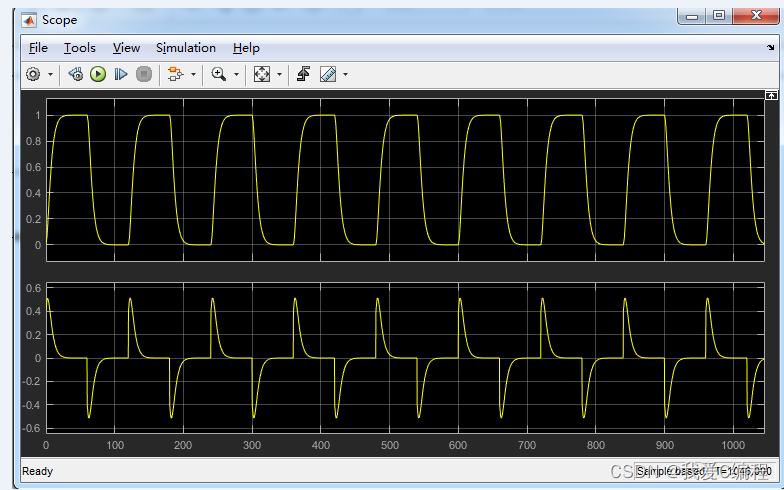
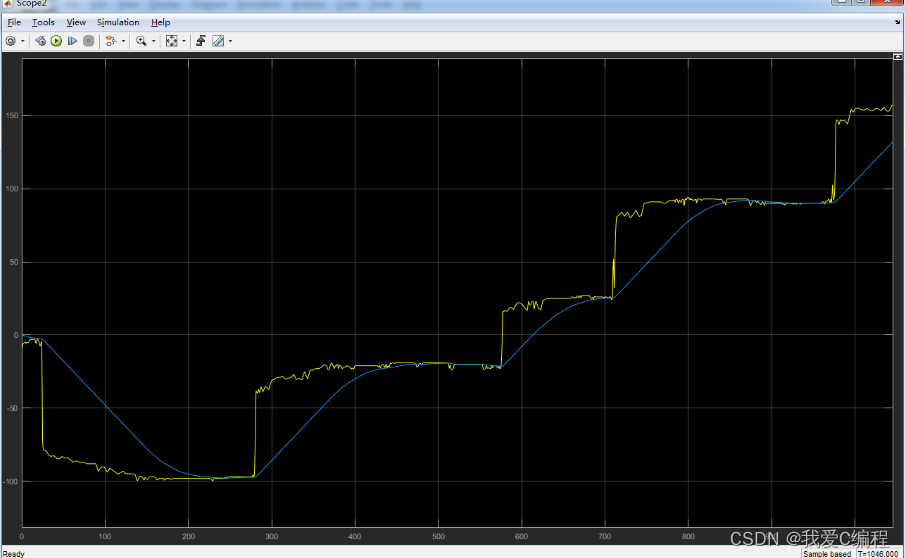
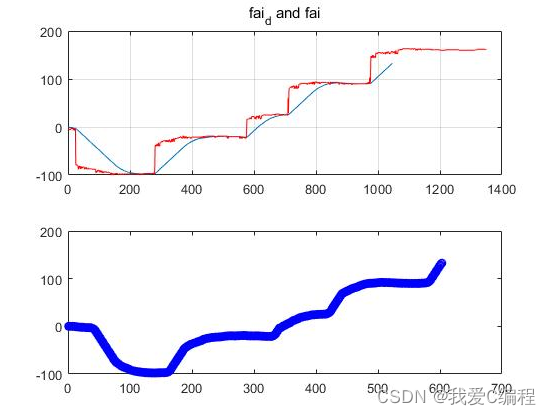
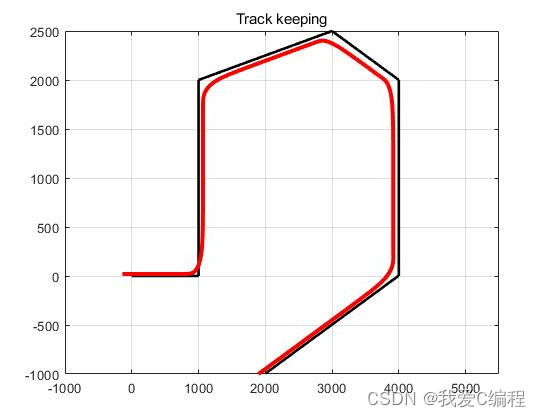
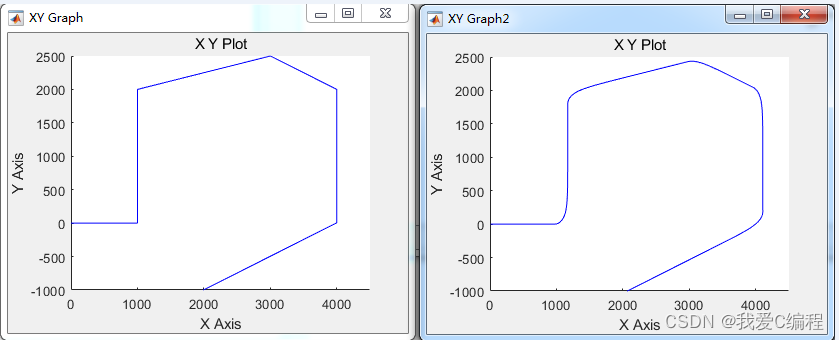
3.部分仿真截图
4.内容简介
模糊自适应控制器同时结合自适应控制和模糊控制,形成具有自适应的功能的控制系统。模糊自适应控制不要求控制对象具有精确的数学模型,并且还巧妙的引入了自适应律以方便实时的去学习被控对象所具有的各种动态特性,然后再根据动态特性的实时变化来自动更新和修改以及在线实时调整对应的模糊控制器,这样就使得系统在出现各种各样的不确定因素的时候,控制器的控制效果仍然可以保持一致以及具有良好的鲁棒性。
模糊自适应控制器的基本框架如图1所示。从图1可以看出,在自适应模糊控制的过程中,自适应规则的设计是依据控制性能指标来设计的,随着环境的变化自适应律不断用来修正模糊控制器中的参数。而在非自适应模糊控制系统,模糊控制器是事先已经设计好的,控制器的参数不依控制性能而改变,这就可能导致控制失效。因此,自适应模糊控制具有较好的控制性能。