1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。
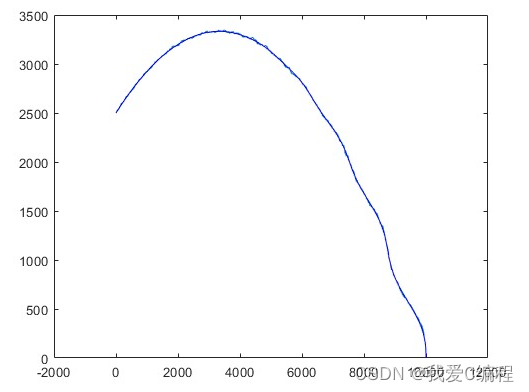
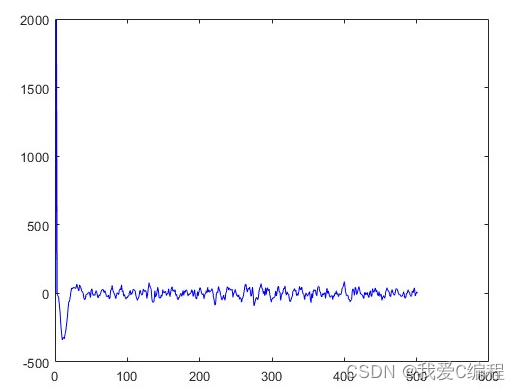
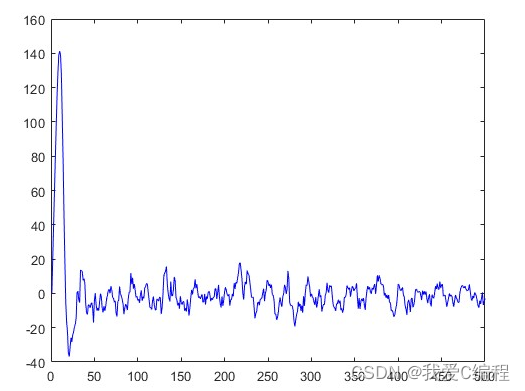
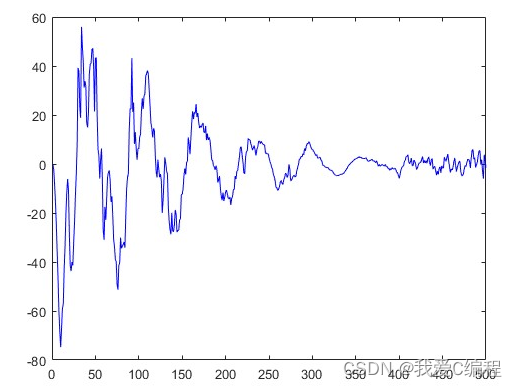
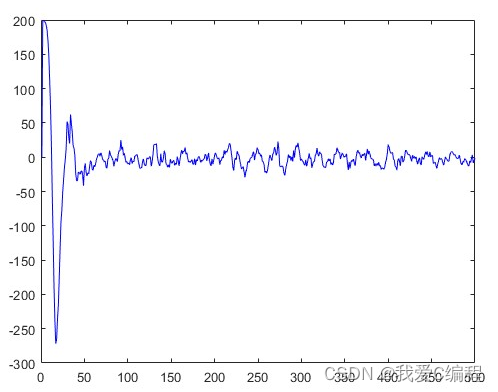
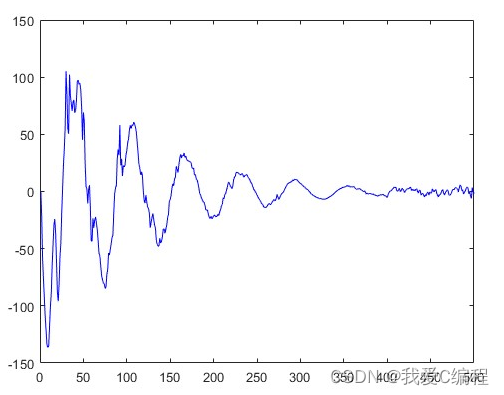
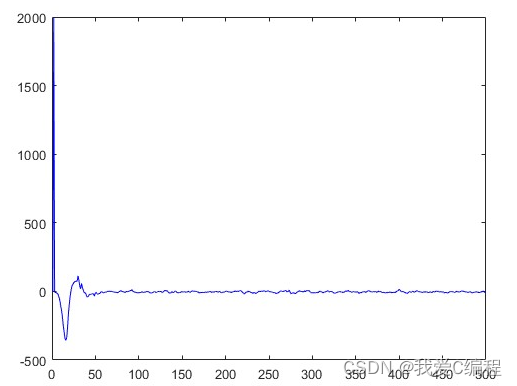
3.部分仿真截图

4.内容简介
交互式多模型(Interacting Multiple Model,简称IMM)是一种算法,具有自适应的特点,能够有效地对各个模型的概率进行调整,尤其适用于对机动目标的定位跟踪。交互式多模型算法包含了多个滤波器(各自对应着相应的模计器,一个交互式作用器和一个估计混合器),多模型通过交互作用跟踪一个目标的机动运动,各模型之间的转移由马尔可夫概率转移矩阵确定,其中的元素Pij表示目标由第i个运动模型转移到第j个运动模型的概率。
在Kalman滤波算法中用到了状态转移方程和观测方程,被估计量随时间变化,他是一种动态估计。在目标跟踪中,不必知道目标的运动模型就能够实时地修正状态参量(位置、速度等信息),有良好的适应性。但是当目标运动运动变得复杂时(比如加速、减速等),仅仅用kalman滤波得不到理想的效果。这时就需要用自适应算法。交互多模型(IMM)是一种软切换算法,现在在机动目标领域得到广泛应用。该算法主要通过两个或更多的模型来描述工作过程中可能的状态,最后通过有效的加权融合进行系统状态估计,能够很好的克服单模型估计误差大的问题。